本記事では、ドローンの基板を PCBWay に発注する方法を説明します。過去記事は以下です。
- ドローン制作 2-1: 準備・部品選定
- ドローン制作 2-2: ブレッドボード試験
- ドローン制作 2-3: ドローン schematic 設計
- ドローン制作 2-4: コネクタ選定と BOM 作成
- ドローン制作 2-5: PCB の設計
発注ファイルの準備
発注に必要なのは以下の 3 ファイルです。詳しくは公式サイトをご確認ください。
- BOM
- Gerber ファイル
- Centroid ファイル
BOM
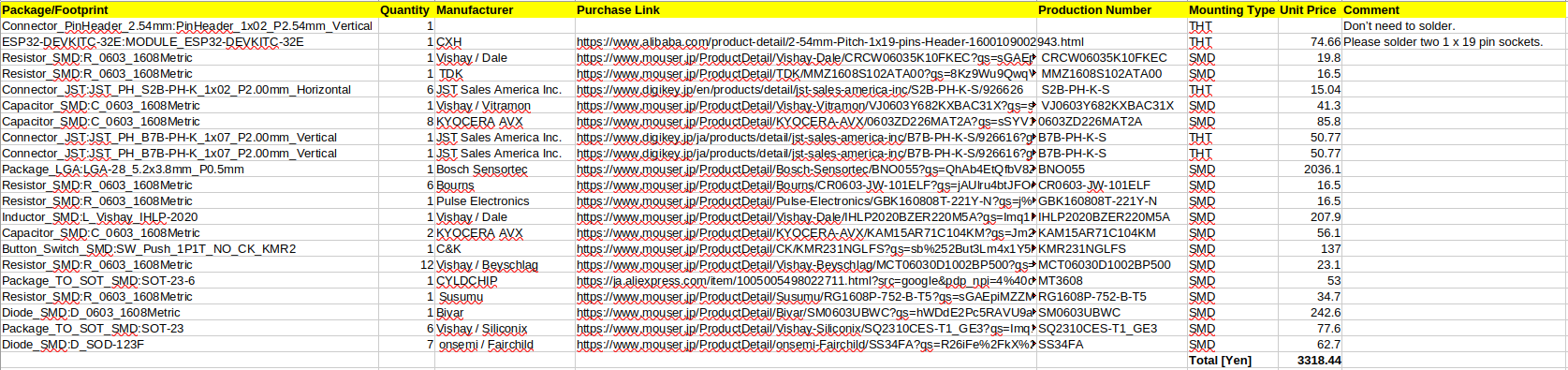
BOM の作成に関しては、「ドローン制作 2-4: コネクタ選定と BOM 作成」の記事で解説しました。以下のような .xlsx ファイルを準備します。
Gerber ファイル
参考
Gerber ファイルの作り方は以下の動画がわかりやすいです。
PCBWay が解説している Gerber データの作成方法も参考にしました。
手順
PCB エディタで、”Place” -> “Drill/Place File Origin” により基板左下の座標を原点に設定します。
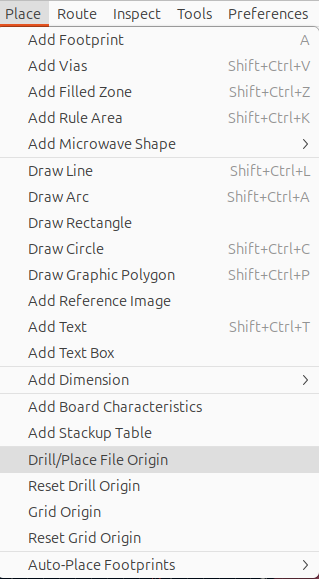
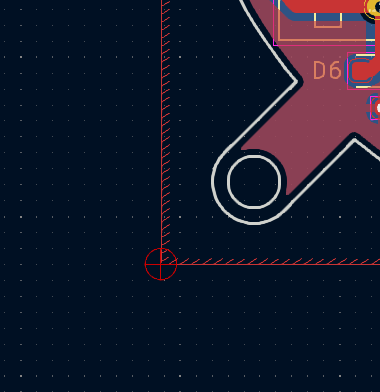
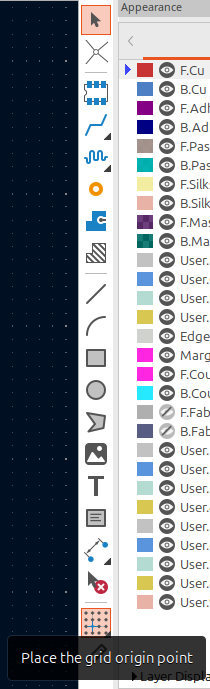
また、”Place the grid origin point” をクリックして、grid の原点を指定します。
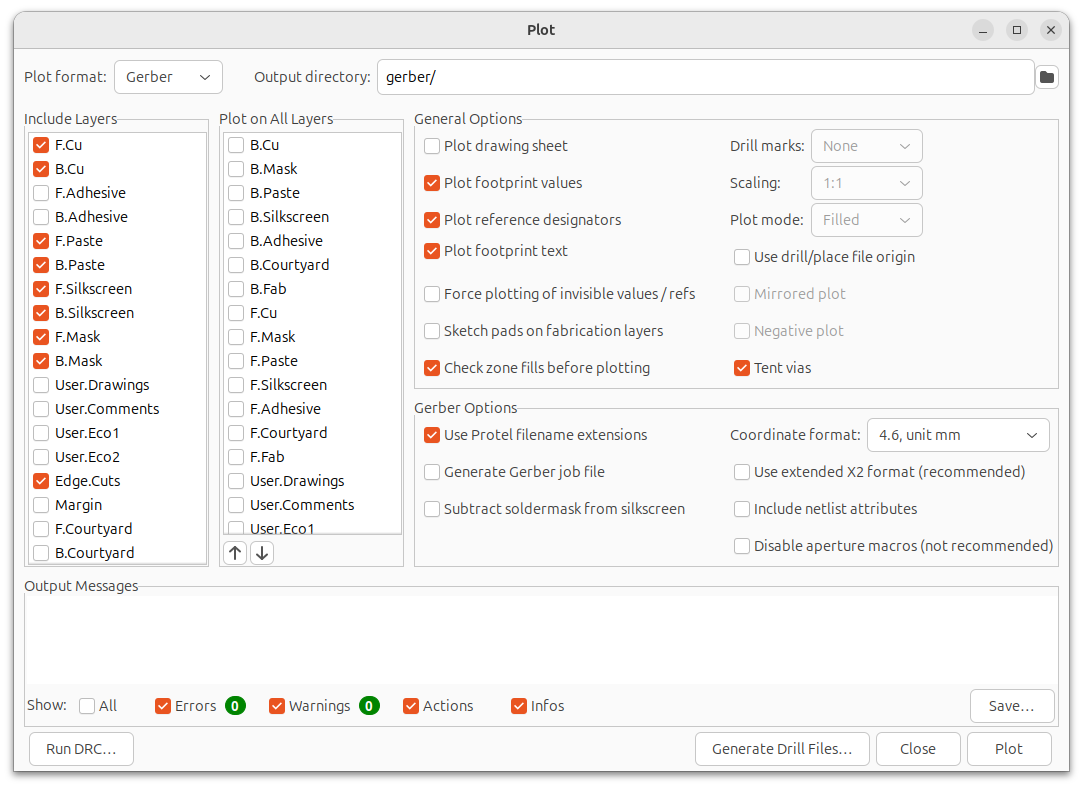
File -> Plot をクリックし、Gerber ファイルの出力設定を以下のようにして Plot ボタンを押します。Output directory(出力先)を gerber という directory にしています。
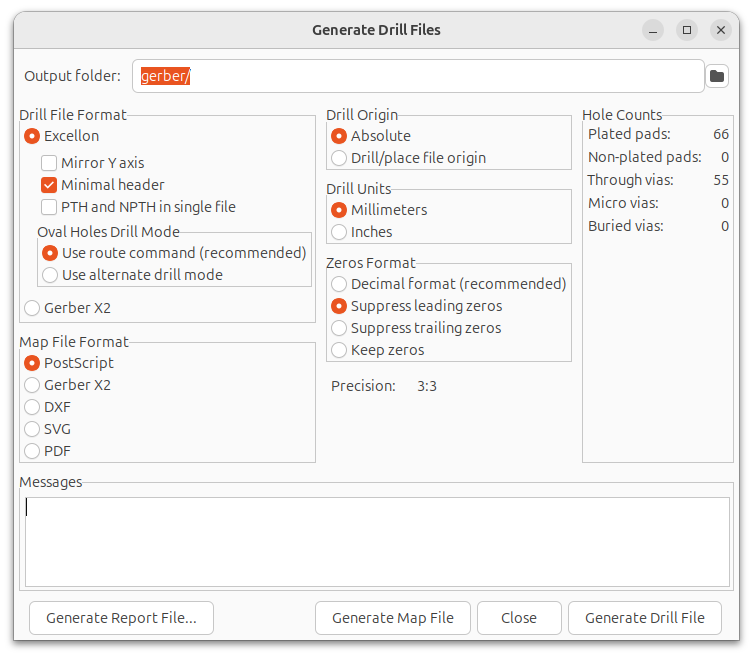
“Generate Drill Files…” をクリックして以下のような設定をした後 “Generate Drill File” ボタンを押して Drill ファイルを出力します。
確認
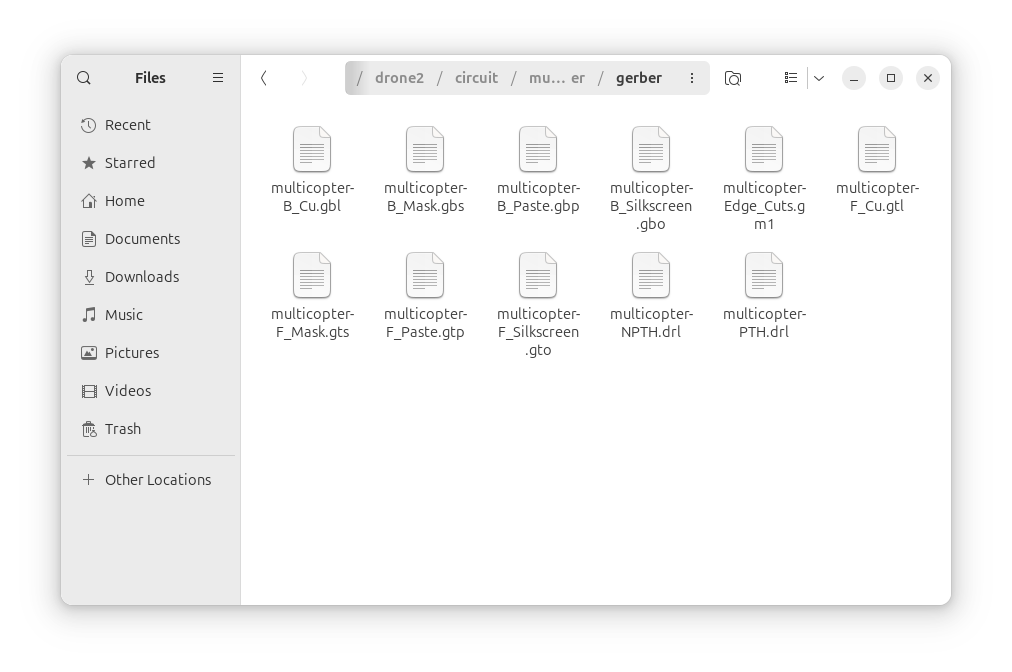
出力された Gerber ファイルと Drill ファイルは以下です。
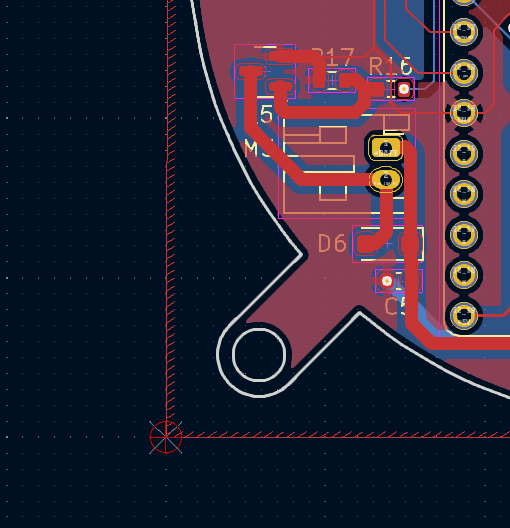
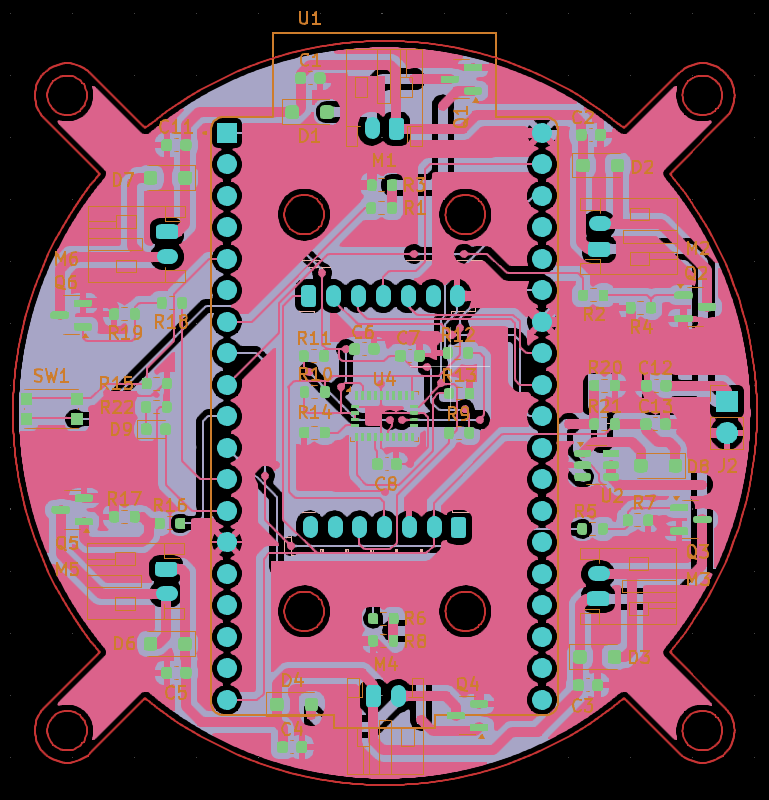
Gerber Viewer を使うと基板の確認ができます。
Centroid ファイル
Centroid ファイルは部品の配置を指定するファイルです。PCBWay 公式が説明しているコチラの記事に従って Centroid ファイルを出力していきます。
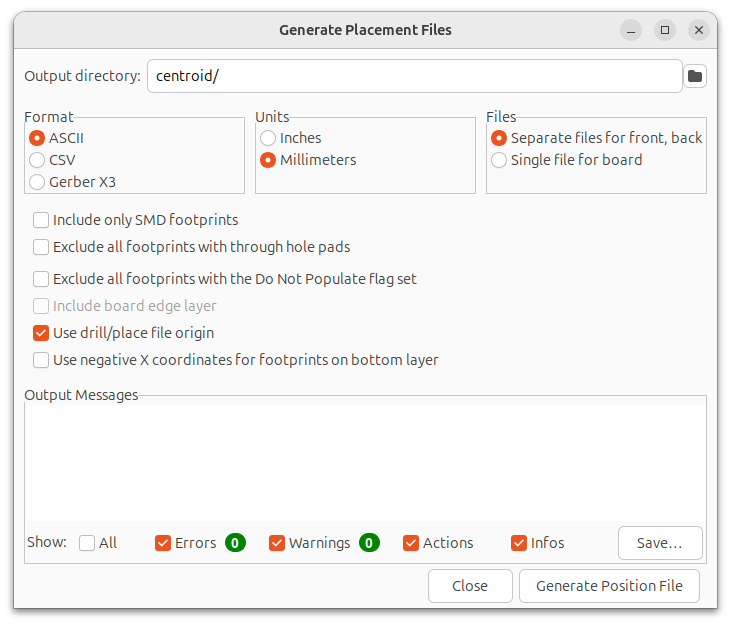
File -> “Fabrication Outputs” -> “Component Placement (.pos, .gbr)…” をクリックします。以下のような設定をして、”Generate Position File” を実行します。
以下のテキストファイル multicopter-top.pos と multicopter-bottom.pos が centroid ディレクトリに生成されます。部品と位置 (x,y) と角度の対応が記されています。
### Footprint positions - created on 2025-03-30T19:42:59+0900 ###
### Printed by KiCad version 8.0.8-8.0.8-0~ubuntu24.04.1
## Unit = mm, Angle = deg.
## Side : top
# Ref Val Package PosX PosY Rot Side
C1 22uF C_0603_1608Metric 25.4150 57.7500 0.0000 top
C2 22uF C_0603_1608Metric 48.0300 53.1800 0.0000 top
C3 22uF C_0603_1608Metric 47.7950 8.7900 0.0000 top
C4 22uF C_0603_1608Metric 23.9500 3.8000 0.0000 top
C5 22uF C_0603_1608Metric 14.6100 9.8000 180.0000 top
C6 0.1uF C_0603_1608Metric 29.7700 35.9000 180.0000 top
C7 6.8nF C_0603_1608Metric 33.4400 35.3700 180.0000 top
C8 0.1uF C_0603_1608Metric 31.5800 26.6100 0.0000 top
C11 22uF C_0603_1608Metric 14.6100 52.3500 180.0000 top
C12 22uF C_0603_1608Metric 53.3150 32.9500 180.0000 top
C13 22uF C_0603_1608Metric 53.2500 29.8400 0.0000 top
D1 SS34 D_SOD-123F 25.3500 55.0000 0.0000 top
D2 SS34 D_SOD-123F 48.7900 50.7000 0.0000 top
D3 SS34 D_SOD-123F 48.5525 11.0800 0.0000 top
D4 SS34 D_SOD-123F 24.1125 7.2500 0.0000 top
D6 SS34 D_SOD-123F 13.9200 12.1300 180.0000 top
D7 SS34 D_SOD-123F 13.9275 49.7000 180.0000 top
D8 SS34 D_SOD-123F 53.4575 26.5000 180.0000 top
D9 LED D_0603_1608Metric 12.9600 29.4300 0.0000 top
J2 Conn_01x02_Pin PinHeader_1x02_P2.54mm_Vertical 59.0100 31.6650 0.0000 top
M1 Motor_DC JST_PH_S2B-PH-K_1x02_P2.00mm_Horizontal 32.3600 53.6700 180.0000 top
M2 Motor_DC JST_PH_S2B-PH-K_1x02_P2.00mm_Horizontal 48.7000 43.9500 90.0000 top
M3 Motor_DC JST_PH_S2B-PH-K_1x02_P2.00mm_Horizontal 48.6200 15.7600 90.0000 top
M4 Motor_DC JST_PH_S2B-PH-K_1x02_P2.00mm_Horizontal 30.5000 7.9200 0.0000 top
M5 Motor_DC JST_PH_S2B-PH-K_1x02_P2.00mm_Horizontal 13.7900 18.1600 -90.0000 top
M6 Motor_DC JST_PH_S2B-PH-K_1x02_P2.00mm_Horizontal 13.8600 45.3500 -90.0000 top
Q1 SQ2310CES SOT-23 37.6025 57.6600 180.0000 top
Q2 SQ2310CES SOT-23 56.4400 39.3000 0.0000 top
Q3 SQ2310CES SOT-23 56.0975 22.1700 0.0000 top
Q4 SQ2310CES SOT-23 38.0800 6.3500 180.0000 top
Q5 SQ2310CES SOT-23 6.2200 22.9275 180.0000 top
Q6 SQ2310CES SOT-23 6.1300 38.6400 180.0000 top
R1 100Ω R_0603_1608Metric 31.1650 47.2700 180.0000 top
R2 100Ω R_0603_1608Metric 48.2300 40.2300 180.0000 top
R3 10kΩ R_0603_1608Metric 31.1800 49.1200 0.0000 top
R4 10kΩ R_0603_1608Metric 52.0600 39.2300 0.0000 top
R5 100Ω R_0603_1608Metric 48.1700 21.4100 180.0000 top
R6 100Ω R_0603_1608Metric 31.3050 14.1700 180.0000 top
R7 10kΩ R_0603_1608Metric 51.8300 22.0900 180.0000 top
R8 10kΩ R_0603_1608Metric 31.2950 12.3900 0.0000 top
R9 10kΩ R_0603_1608Metric 37.4050 29.1400 0.0000 top
R10 10kΩ R_0603_1608Metric 25.7700 32.4400 180.0000 top
R11 10kΩ R_0603_1608Metric 25.7100 35.3400 0.0000 top
R12 10kΩ R_0603_1608Metric 37.3150 35.5900 0.0000 top
R13 10kΩ R_0603_1608Metric 37.4250 32.3200 0.0000 top
R14 10kΩ R_0603_1608Metric 25.7500 29.1700 180.0000 top
R15 5.1kΩ R_0603_1608Metric 13.0350 33.1200 180.0000 top
R16 100Ω R_0603_1608Metric 14.1000 21.8400 0.0000 top
R17 10kΩ R_0603_1608Metric 10.4200 22.3900 0.0000 top
R18 100Ω R_0603_1608Metric 14.2600 39.6200 0.0000 top
R19 10kΩ R_0603_1608Metric 10.4300 38.7100 0.0000 top
R20 1kΩ R_0603_1608Metric 49.1400 32.9600 180.0000 top
R21 7.5kΩ R_0603_1608Metric 49.1400 29.8600 0.0000 top
R22 220Ω R_0603_1608Metric 13.0000 31.2300 180.0000 top
SW1 SW_Push SW_Push_1P1T_NO_CK_KMR2 4.5500 31.0800 180.0000 top
U1 ESP32-DEVKITC-32E MODULE_ESP32-DEVKITC-32E 31.3950 30.5000 0.0000 top
U2 MT3608 SOT-23-6 48.5075 26.5400 0.0000 top
U4 BNO055 LGA-28_5.2x3.8mm_P0.5mm 31.3950 30.5000 0.0000 top
## End### Footprint positions - created on 2025-03-30T19:42:59+0900 ###
### Printed by KiCad version 8.0.8-8.0.8-0~ubuntu24.04.1
## Unit = mm, Angle = deg.
## Side : bottom
# Ref Val Package PosX PosY Rot Side
L1 22uH L_Vishay_IHLP-2020 51.2000 32.5100 180.0000 bottom
U3 PMW3901 JST_PH_B7B-PH-K_1x07_P2.00mm_Vertical 25.2700 40.1700 0.0000 bottom
U6 VL53L1X JST_PH_B7B-PH-K_1x07_P2.00mm_Vertical 37.3700 21.5200 180.0000 bottom
## EndPCBWay に発注
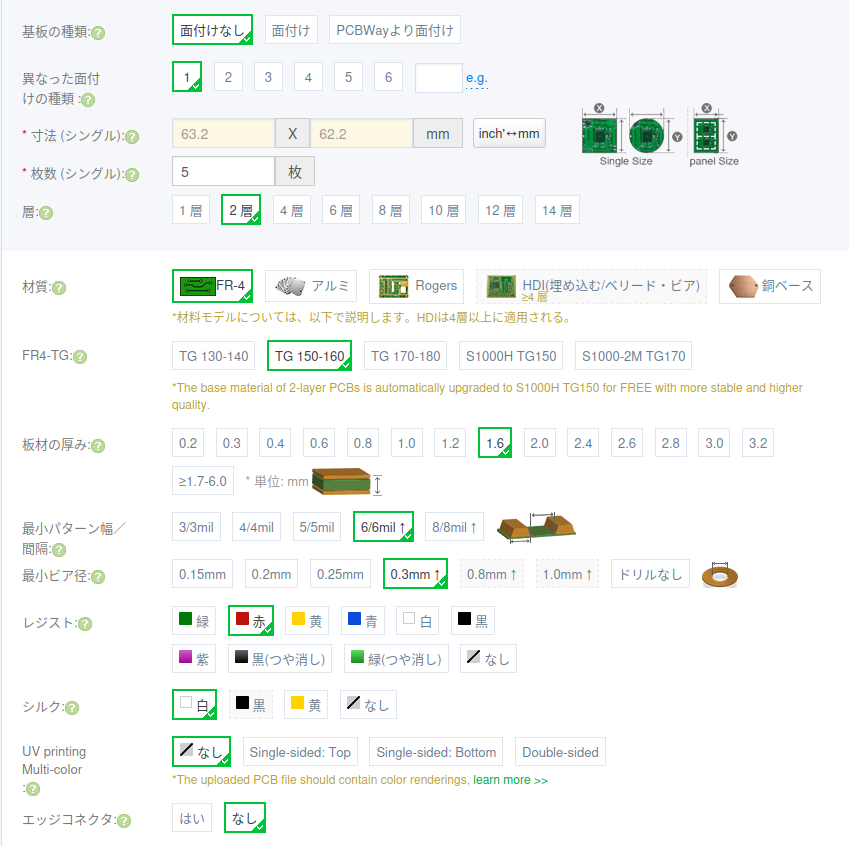
以前リモートコントローラ用 PCB を制作したときとほぼ同じですが、部品実装サービスで以下のように項目を入力します。今回は赤色の基板を発注することにします。


最終的に $34 ほどになりました。

まとめ
PCB の発注を終えたので、4 月からは筐体作成とプログラミングに移っていきたいと思います!
コメント