前回の記事でブレッドボード上での試験を行い、モータが回ることとセンサが正常に動作することを確認できました。本記事ではこれに基づき、回路図(schematic)の設計を行っていきます。
ピン配置の説明は、ブレッドボード上の試験と同様なので省略します。こちらをご覧ください。
KiCad に未登録のモジュールの作成
KiCad に登録されていないモジュールは以下です。
- ESP32-DevKitC V4 モジュール
- PIM453 (PMW3901 モジュール)
- POLOLU-3415 (VL53L1X モジュール)
ESP32-DevKitC V4 モジュールはネット上で見つけた symbol / footprint を流用し、PIM453 と POLOLU-3415 に関しては KiCad の Symbol Editor によって symbol を作成します。footprint は PH 2.0 コネクタを利用するつもりなので、footprint の作成は行いません。
symbol の作成方法に関しては以下の 2 つの動画が非常にわかりやすいのでおすすめです。
ESP32-DevKitC V4 モジュール
ESP32-DevKitC V4 に関してはこのサイトで symbol と footprint が公開されていたので流用します。インポートの仕方はこちらの記事を参照してください。
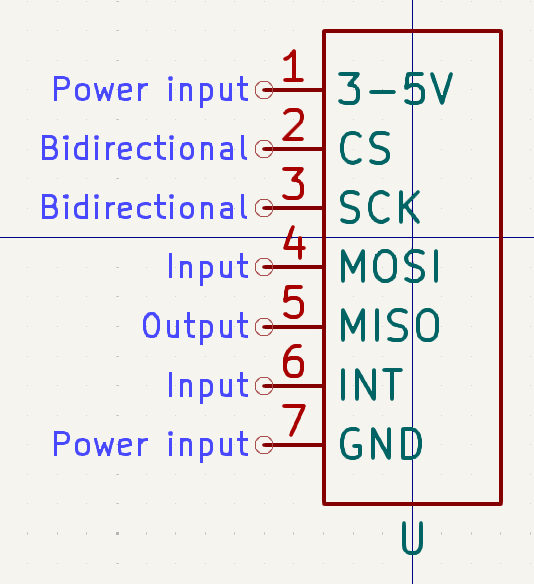
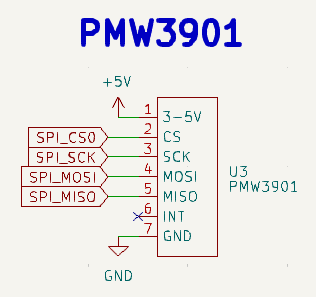
PIM453 (PMW3901 モジュール)
PIM453 は 7 つのピンを有していて、SPI 方式で ESP32 と通信します。
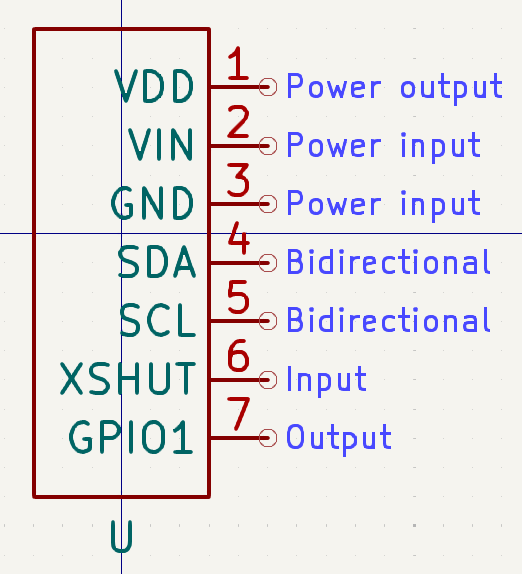
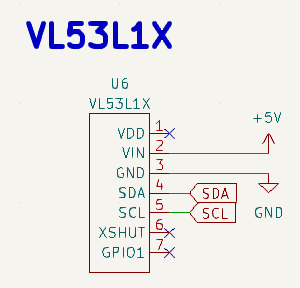
POLOLU-3415 (VL53L1X モジュール)
POLOLU-3415 は 7 つのピンを有していて、I2C 方式で ESP32 と通信します。
回路図
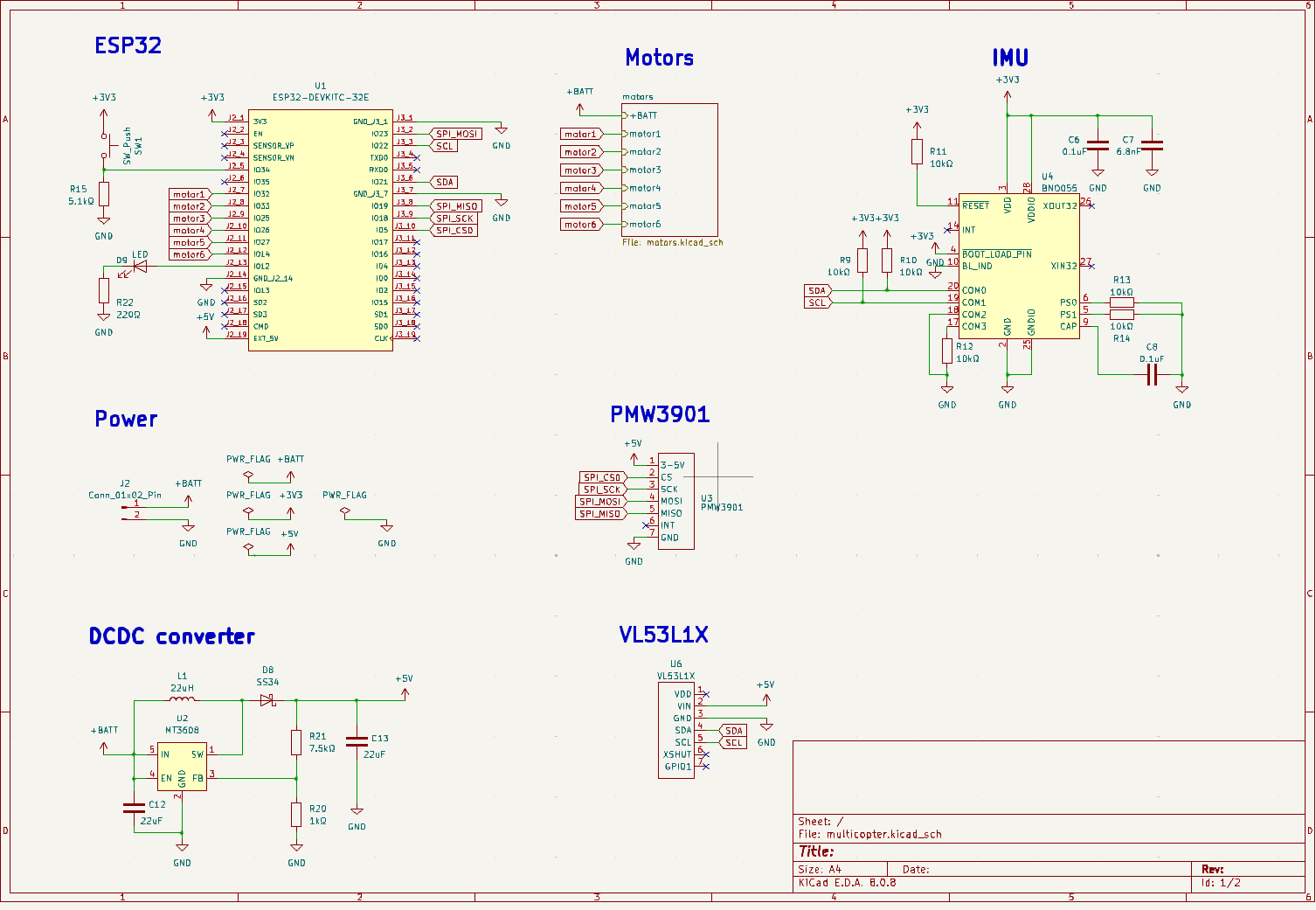
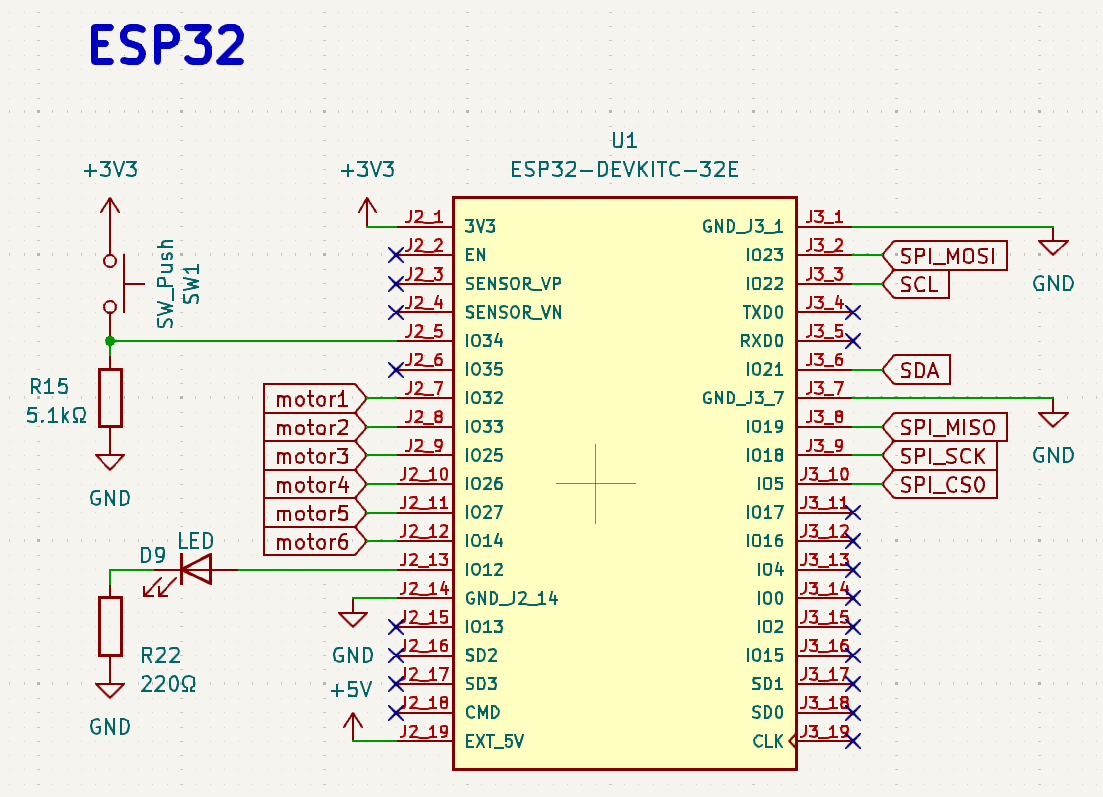
ESP32-DevKitC V4
ESP32-DevKitC 周りの回路はブレッドボード試験のときと同一です(参考記事)。
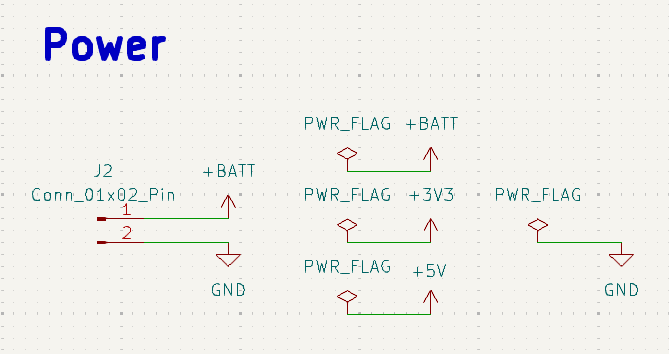
Power
電源に関連するコンポーネントには、「PWR_FLAG」をつなげて電源であることを明示する必要があります。
| 記号 | 役割 |
| +BATT | バッテリからの電源入力 |
| GND | GND |
| 3V3 | ESP32-DevKit C モジュール内で regulate された 3.3V 電圧 |
| 5V | 昇圧モジュールによって昇圧された 5V 電圧 |
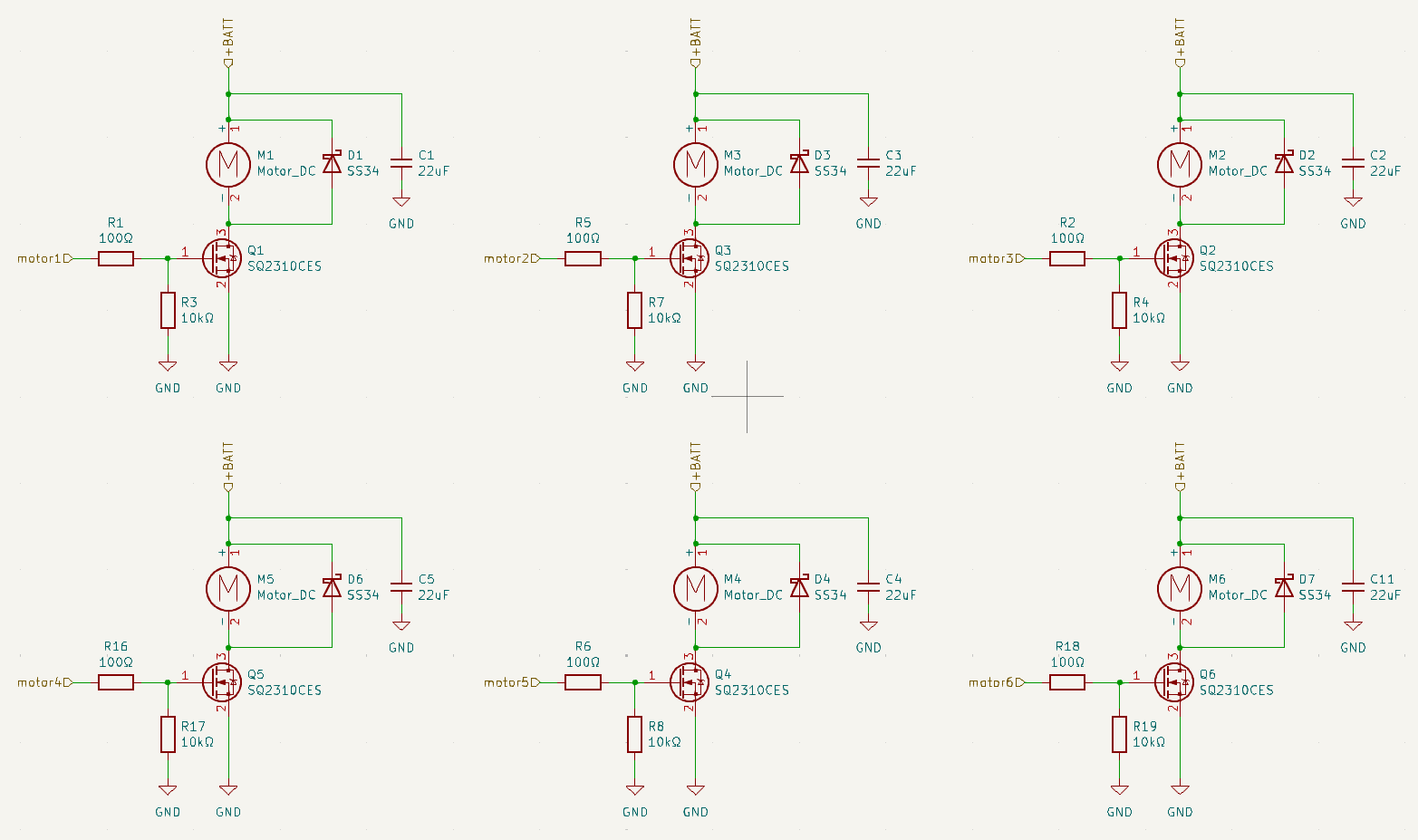
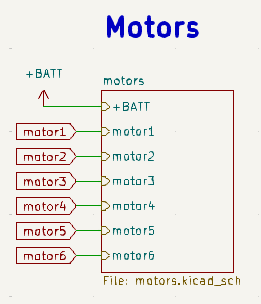
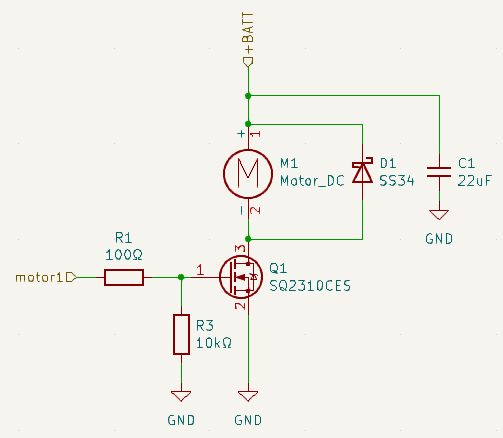
モータ
ブレッドボード上試験の回路を流用しますが、MOSFET とダイオードを SMD 部品にします。
この記事で選定したとおり、Nch MOSFET には SQ2310CES を使い、前回ドローンを作成したときと同様にダイオードは SS34 を使います。
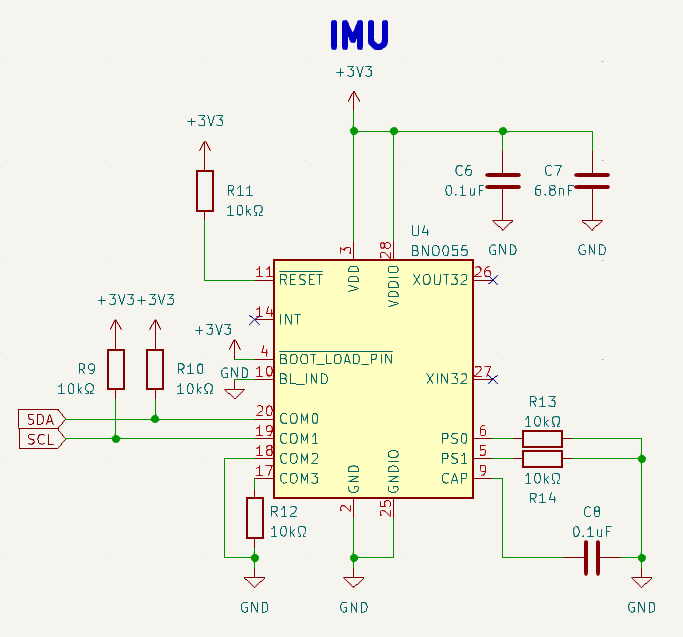
IMU
omni-wheel robot を制作したときの回路を流用します(配線で注意したポイントについて詳しくはコチラをご参照ください)。
PMW3901
ブレッドボード試験で問題なく動作したので、こちらと同様の回路にします。
VL53L1X
ブレッドボード試験で問題なく動作したので、こちらと同様の回路にします。
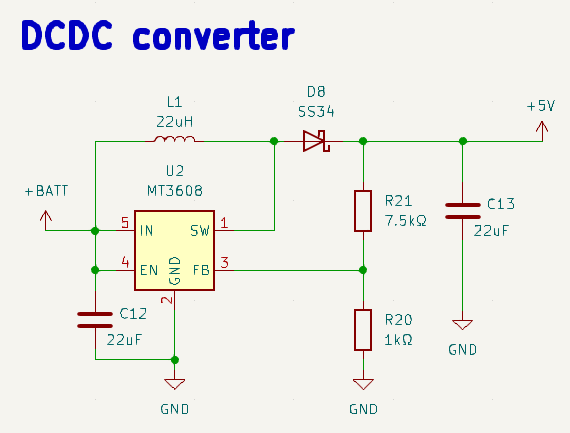
昇圧コンバータ
概要
今回は MT3608 という DCDC converter を使います(データシート)。
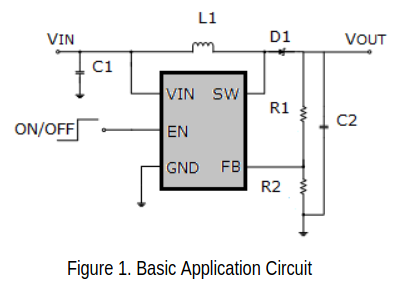
上記の回路図において、VREF = 0.6V が成り立ち、VOUT は R1 と R2 の関係によって以下のように求まります。
$$V_{OUT} = V_{REF} \times (1 + \frac{R_1}{R_2})$$
こちらのサイトに載っているサンプルの回路図のように、R1 = 7.5kΩ, R2 = 1kΩ とすると、VOUT は 5.1V となります。
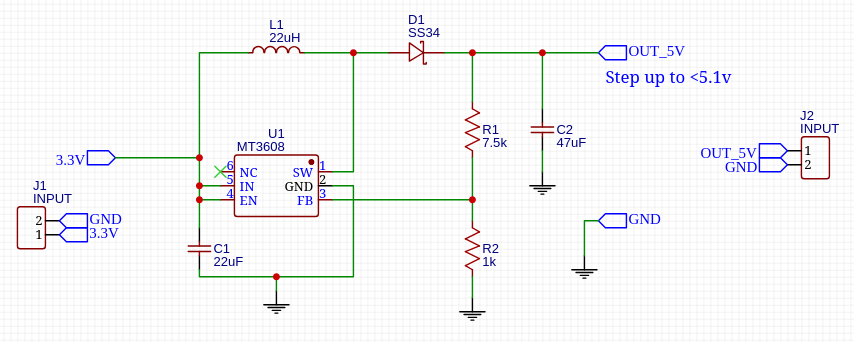
ESP32-DevKitC V4 の回路図を見ると、ESP32 モジュールへの入力電圧を 3.3V にするために AMS1117-3.3 という IC が使われており、データシートには入力電圧は 4.75V から 10V である必要があると書かれています。よって、R1 と R2 を上記の値を R1 = 7.5kΩ, R2 = 1kΩ として 5.1V を AMS1117-3.3 に印加すると、必要な入力電圧の条件を満たすことができます。
MT3608 のデータシートを読むと、以下のデザインガイドラインが書いてあります。
インダクタ
- 4.7uH ~ 22uH が望ましい。
- 低コア損失(交流磁場によるエネルギー損失)・低 DCR(DC Resistance: 直流抵抗)のものが望ましい。
- 大きなインダクタンスだとリップル電流を抑えられる、小さなインダクタンスだと過渡応答特性が良くなる。これらはトレードオフ(参考)
22uH のこちらのインダクタを採用する。
コンデンサ
- 入力側も出力側も 22uF のセラミックコンデンサが望ましい。
- より良い電圧フィルタリングパフォーマンスのため、低い ESR(Equivalent Series Resistance: 等価直列抵抗)ものが望ましい。
- 広範囲の電圧・温度に対応できるため、X5R や X7R が望ましい。
22uF のこちらのコンデンサを採用する。
ダイオード
- ショットキーダイオードは以下の特性を持っている。
- 順方向電圧降下が小さい
- 逆回復時間(順方向から逆方向に電圧をかけたとき、逆方向電流がゼロになるまでの時間)が短い
- 高速整流(high speed rectification)
- 逆方向降伏電圧(reverse breakdown voltage)は、出力電圧 VOUT より大きい必要がある。
繰り返し逆電圧(repetitive reverse voltage)が 40V で、出力電圧 5V よりはるかに大きいショットキーダイオード SS34 を使うこととする。
※ 逆方向降伏電圧はデータシートに載っていなかった。繰り返し逆電圧は「繰り返し印加できる逆電圧の最大許容瞬時値」を表す(参考)。
PCB レイアウト
- ノイズ低減のため、入出力コンデンサは IC の近くに配置されていて GND ベタにつながっている必要がある。
- ノイズ防止と放熱のため、GND ピンは強い GND ベタにつながっている必要がある。
- メインの電流が流れるトレースは可能な限り太く短くする。
- SW ピンは高周波の大きな電圧変動がある。そのため、パターンをできるだけ小さく短く設計すべき。
- フィードバック回路の部品(抵抗・コンデンサ等)をできるだけ IC の近くに配置し、ノイズ源(インダクタ・MOSFET・BNO055 モジュール・高速クロック IC 等)を遠くに配置すべき。
回路図
エラーチェック
Inspect -> Electrical Rules Checker -> Run ERC を実行します。
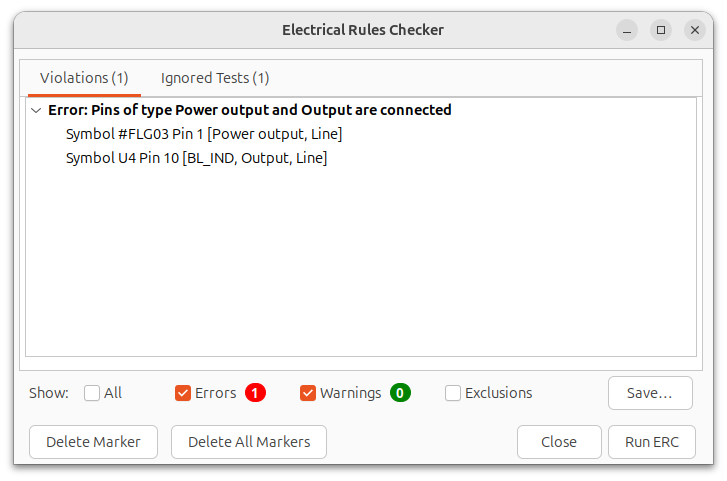
symbol の PIN の接続が想定通りでないという意味の Error が出ていますが、無視して大丈夫です。omni-wheel robot 制作時も出ていたエラーで、無視しても問題なく回路は動作していました。
まとめ
今回はドローンの schematic の設計を完成させました!昇圧コンバータ以外は前回制作したドローンや omni-wheel robot の回路を流用できたので楽できました。

コメント