bmx055(IMU センサ)を ESP32 で使用する際の備忘録をまとめておきます。秋月電子にて bmx055 のモジュールは買えます。arduino で bmx055 を使いたい場合や madgwick filter の使い方を知りたい場合は過去記事もご覧ください。
Circuit
配線図は以下のようになり、
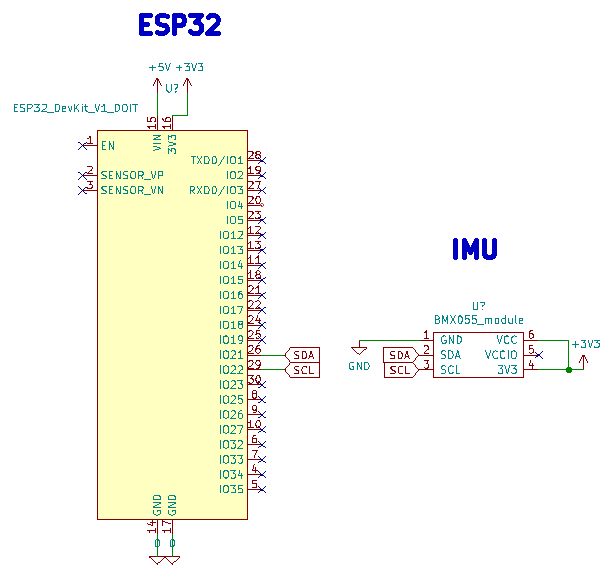
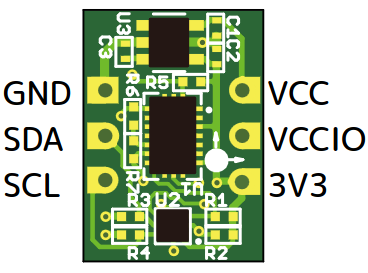
PIN はそれぞれ以下のようにつなぎます。
| VCC | 3V3 |
| 3V3 | 3V3 |
| GND | GND |
| SDA | IO21 |
| SCL | 22 |
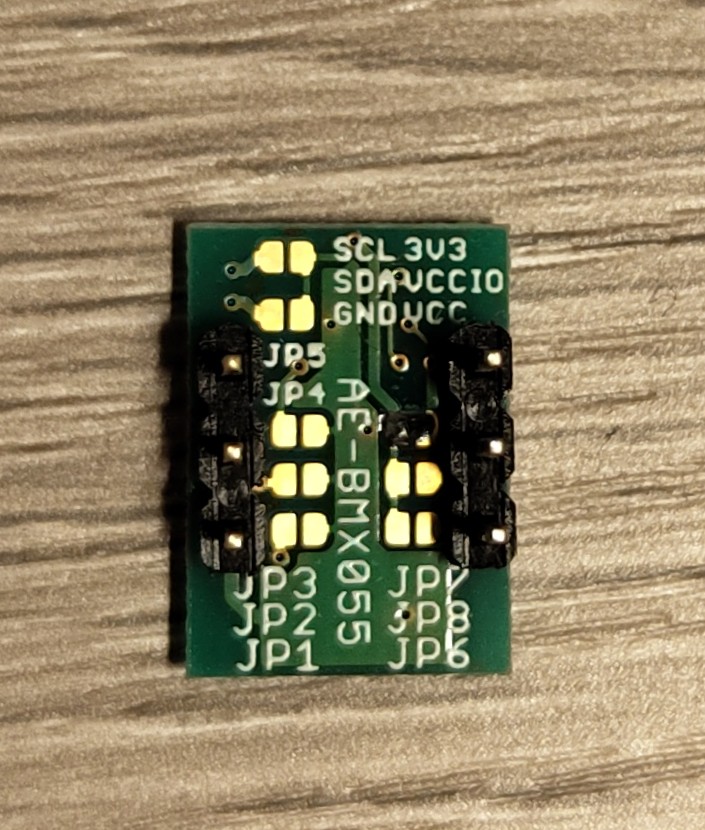
以下のように JP7 のピンをショートさせています。
Source code
基本的には、秋月電子のウェブサイトから取得できるサンプルプログラムを使用できますが、

以下の箇所を修正しないと加速度が正しく出力されませんでした(0.00098 -> 0.0098)。
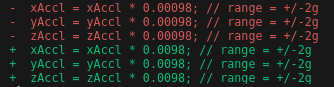
全体のソースコードを以下に添付します。
//================================================================//
// AE-BMX055 Arduino UNO //
// VCC +5V //
// GND GND //
// SDA A4(SDA) //
// SCL A5(SCL) //
// //
// (JP4,JP5,JP6はショートした状態) //
// http://akizukidenshi.com/catalog/g/gK-13010/ //
//================================================================//
#include<Wire.h>
// BMX055 加速度センサのI2Cアドレス
#define Addr_Accl 0x19 // (JP1,JP2,JP3 = Openの時)
// BMX055 ジャイロセンサのI2Cアドレス
#define Addr_Gyro 0x69 // (JP1,JP2,JP3 = Openの時)
// BMX055 磁気センサのI2Cアドレス
#define Addr_Mag 0x13 // (JP1,JP2,JP3 = Openの時)
// センサーの値を保存するグローバル変数
float xAccl = 0.00;
float yAccl = 0.00;
float zAccl = 0.00;
float xGyro = 0.00;
float yGyro = 0.00;
float zGyro = 0.00;
int xMag = 0;
int yMag = 0;
int zMag = 0;
void setup()
{
// Wire(Arduino-I2C)の初期化
Wire.begin();
// デバッグ用シリアル通信は9600bps
Serial.begin(9600);
//BMX055 初期化
BMX055_Init();
delay(300);
}
void loop()
{
Serial.println("--------------------------------------");
//BMX055 加速度の読み取り
BMX055_Accl();
Serial.print("Accl= ");
Serial.print(xAccl);
Serial.print(",");
Serial.print(yAccl);
Serial.print(",");
Serial.print(zAccl);
Serial.println("");
//BMX055 ジャイロの読み取り
BMX055_Gyro();
Serial.print("Gyro= ");
Serial.print(xGyro);
Serial.print(",");
Serial.print(yGyro);
Serial.print(",");
Serial.print(zGyro);
Serial.println("");
//BMX055 磁気の読み取り
BMX055_Mag();
Serial.print("Mag= ");
Serial.print(xMag);
Serial.print(",");
Serial.print(yMag);
Serial.print(",");
Serial.print(zMag);
Serial.println("");
delay(1000);
}
//=====================================================================================//
void BMX055_Init()
{
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x0F); // Select PMU_Range register
Wire.write(0x03); // Range = +/- 2g
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x10); // Select PMU_BW register
Wire.write(0x08); // Bandwidth = 7.81 Hz
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x11); // Select PMU_LPW register
Wire.write(0x00); // Normal mode, Sleep duration = 0.5ms
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x0F); // Select Range register
Wire.write(0x04); // Full scale = +/- 125 degree/s
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x10); // Select Bandwidth register
Wire.write(0x07); // ODR = 100 Hz
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x11); // Select LPM1 register
Wire.write(0x00); // Normal mode, Sleep duration = 2ms
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4B); // Select Mag register
Wire.write(0x83); // Soft reset
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4B); // Select Mag register
Wire.write(0x01); // Soft reset
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4C); // Select Mag register
Wire.write(0x00); // Normal Mode, ODR = 10 Hz
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4E); // Select Mag register
Wire.write(0x84); // X, Y, Z-Axis enabled
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x51); // Select Mag register
Wire.write(0x04); // No. of Repetitions for X-Y Axis = 9
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x52); // Select Mag register
Wire.write(16); // No. of Repetitions for Z-Axis = 15
Wire.endTransmission();
}
//=====================================================================================//
void BMX055_Accl()
{
unsigned int data[6];
for (int i = 0; i < 6; i++)
{
Wire.beginTransmission(Addr_Accl);
Wire.write((2 + i));// Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Accl, 1);// Request 1 byte of data
// Read 6 bytes of data
// xAccl lsb, xAccl msb, yAccl lsb, yAccl msb, zAccl lsb, zAccl msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data to 12-bits
xAccl = ((data[1] * 256) + (data[0] & 0xF0)) / 16;
if (xAccl > 2047) xAccl -= 4096;
yAccl = ((data[3] * 256) + (data[2] & 0xF0)) / 16;
if (yAccl > 2047) yAccl -= 4096;
zAccl = ((data[5] * 256) + (data[4] & 0xF0)) / 16;
if (zAccl > 2047) zAccl -= 4096;
xAccl = xAccl * 0.0098; // range = +/-2g
yAccl = yAccl * 0.0098; // range = +/-2g
zAccl = zAccl * 0.0098; // range = +/-2g
}
//=====================================================================================//
void BMX055_Gyro()
{
unsigned int data[6];
for (int i = 0; i < 6; i++)
{
Wire.beginTransmission(Addr_Gyro);
Wire.write((2 + i)); // Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Gyro, 1); // Request 1 byte of data
// Read 6 bytes of data
// xGyro lsb, xGyro msb, yGyro lsb, yGyro msb, zGyro lsb, zGyro msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data
xGyro = (data[1] * 256) + data[0];
if (xGyro > 32767) xGyro -= 65536;
yGyro = (data[3] * 256) + data[2];
if (yGyro > 32767) yGyro -= 65536;
zGyro = (data[5] * 256) + data[4];
if (zGyro > 32767) zGyro -= 65536;
xGyro = xGyro * 0.0038; // Full scale = +/- 125 degree/s
yGyro = yGyro * 0.0038; // Full scale = +/- 125 degree/s
zGyro = zGyro * 0.0038; // Full scale = +/- 125 degree/s
}
//=====================================================================================//
void BMX055_Mag()
{
unsigned int data[8];
for (int i = 0; i < 8; i++)
{
Wire.beginTransmission(Addr_Mag);
Wire.write((0x42 + i)); // Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Mag, 1); // Request 1 byte of data
// Read 6 bytes of data
// xMag lsb, xMag msb, yMag lsb, yMag msb, zMag lsb, zMag msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data
xMag = ((data[1] <<5) | (data[0]>>3));
if (xMag > 4095) xMag -= 8192;
yMag = ((data[3] <<5) | (data[2]>>3));
if (yMag > 4095) yMag -= 8192;
zMag = ((data[5] <<7) | (data[4]>>1));
if (zMag > 16383) zMag -= 32768;
}Result
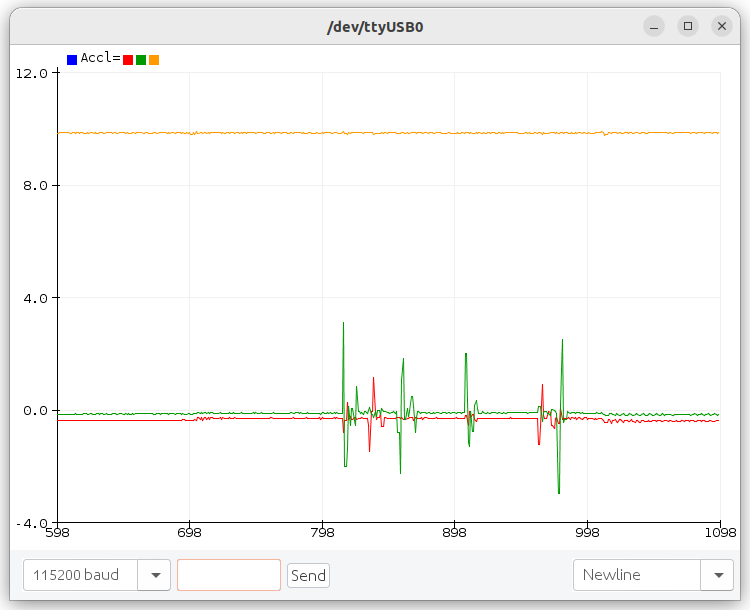
以下は加速度の値をプロットしていますが、地面に bmx055 を置いておくと z 軸方向に +9.8m/s^2 ほどの加速度が出ており、少し動かすと x, y 軸方向にも加速度が出力されます。


コメント