以前この記事でドローンが飛ばない理由について考察しましたが,ドローンのモータ出力が足りなかった最も大きな原因は…
おそらく配線抵抗でした.
なので,記事の考察で目をつけていなかった部分が一番大きな要因だったということになりますね(~.~;)
この記事では,ドローンのモータ出力が足りなかった原因の考察と今後の展望をまとめます.
ドローンの出力があまりにも小さかった原因
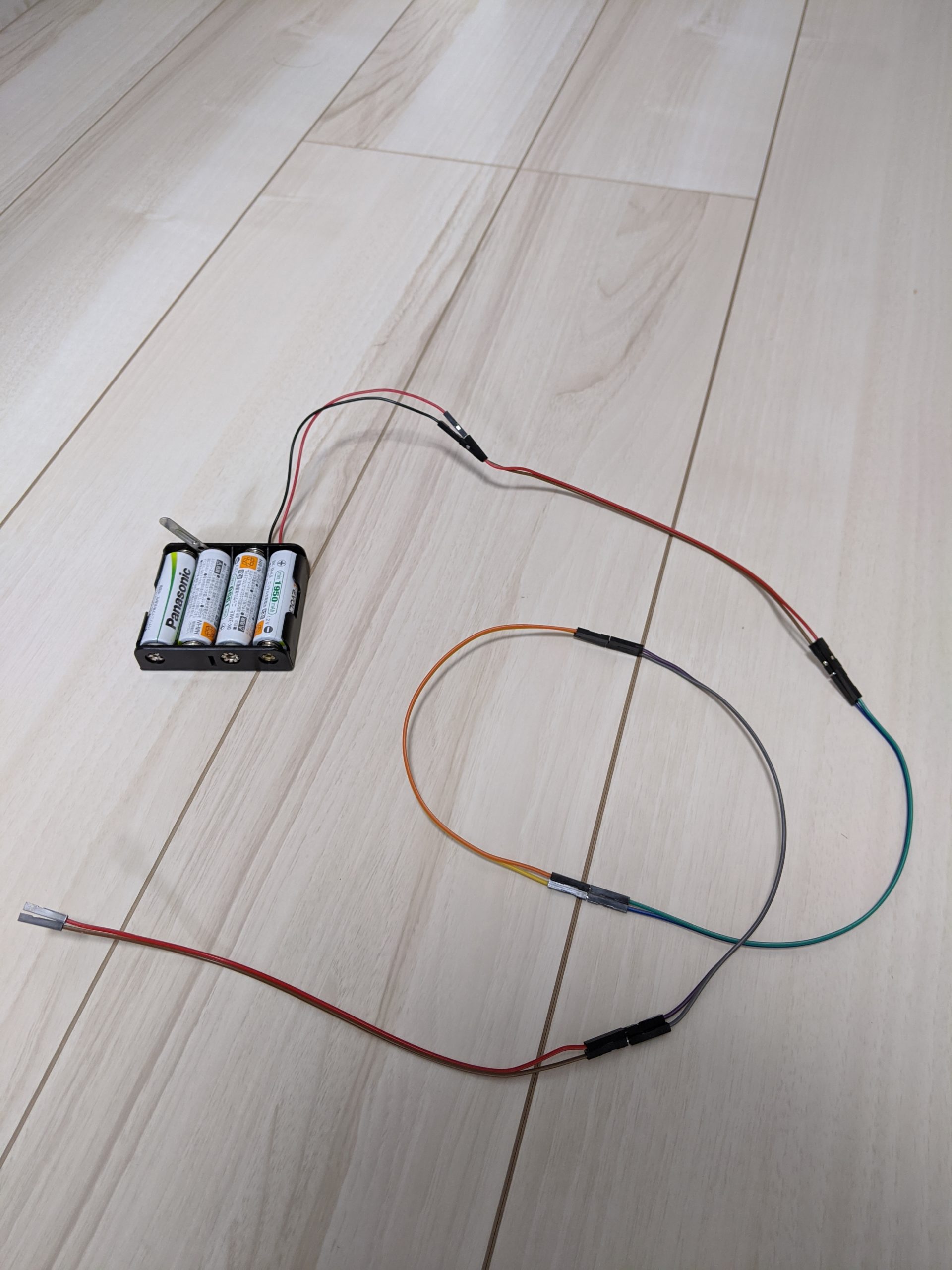
ドローンに4本のevoltaで給電していますが,この配線をとても長くしていたというのがモータ出力が小さかった直接の原因だと思います.具体的には,配線を約105cmにしていました.
動画を比べてみます.
配線が長かったときのドローンの挙動
これが,105cmのリード線でevoltaとドローンをつなげたときのドローンの挙動です.
配線を短くしてみたときのドローンの挙動
これが,リード線を13cmにしてみたときのドローンの挙動です.
プロペラの種類,プロペラガードの有無等細かな違いはありますが,モータ出力は相当違うことがわかるかと思います.
配線抵抗について
105cmの配線抵抗を測ってみたところ,片方のリード線で1Ωありました.つまり,VccとGNDで合わせると2Ωの抵抗だったということです.
そりゃモータ出力が小さくなるわけですよね.例えば2Aの電流を流したら,4V電圧降下するわけですから.
ちなみに,配線を短くしたときの配線抵抗を調べてみると,片側で0.1Ω以下になりました.(私が使っているテスターではそれ以上の精度で測れませんでした.)
ドローンが制御不能になる現象
また,時々ドローンが制御不能になることがあったのですが,これも「配線抵抗が大きいことによって,マイコンとつないでいるGND側の電圧が上下してマイコンが誤動作をしていた」というのが原因だと思います.配線を短くしたらこの現象は起きなくなりました.
図に描いてみるとこんな感じです.今回のように配線抵抗R1が大きいとVgndがもろにモータ電流Imの影響を受けることがわかると思います.本当は0VになってほしいVgndが,Imの値によって大きくなってしまいます.
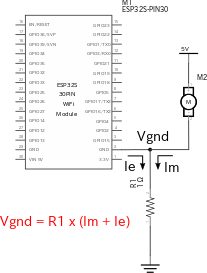
これを改善するためには配線抵抗を小さくする必要があり,以下のようなつなぎ方に工夫する必要がありますね.
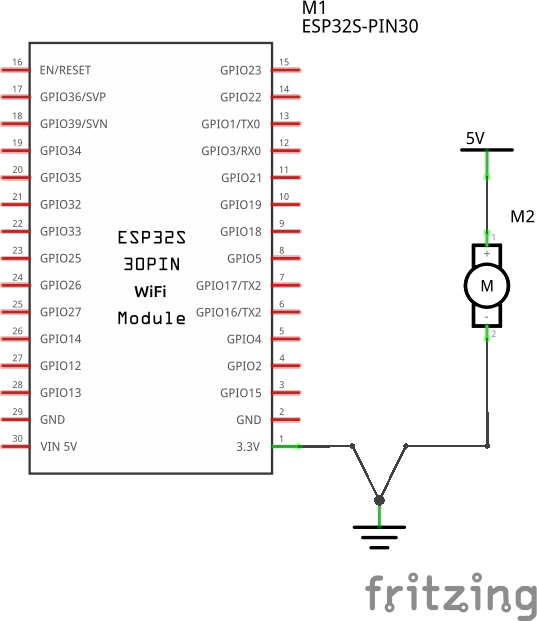
これもD先輩に教えてもらいました.ありがとうございました.
今後の展望
今後の展望としては,以下の改善をすればドローンはホバリングするのではないかと考えているのでとりあえずやってみようと思います.
- PCBにして,全ての配線を短くすることで配線抵抗を小さくする.
- evoltaではなく,出力の大きいリポバッテリを使う.
- MOSFETをRds(on)抵抗の小さなものに変えてみる.
- 機体を軽くする.
- リポバッテリを誤配線しない仕組み or 誤配線をしてもショートしない回路を作る.
- (それでも飛ばなければ)モータの種類を変更する.


コメント