夏休みをかけて製作したドローンが飛ばなかったのが相当ショックだったので,なぜ自分が作ったドローンが飛ばないのかを,世の中の飛んでるドローンと比較しながら紐解き,改善策を模索していこうと思います.
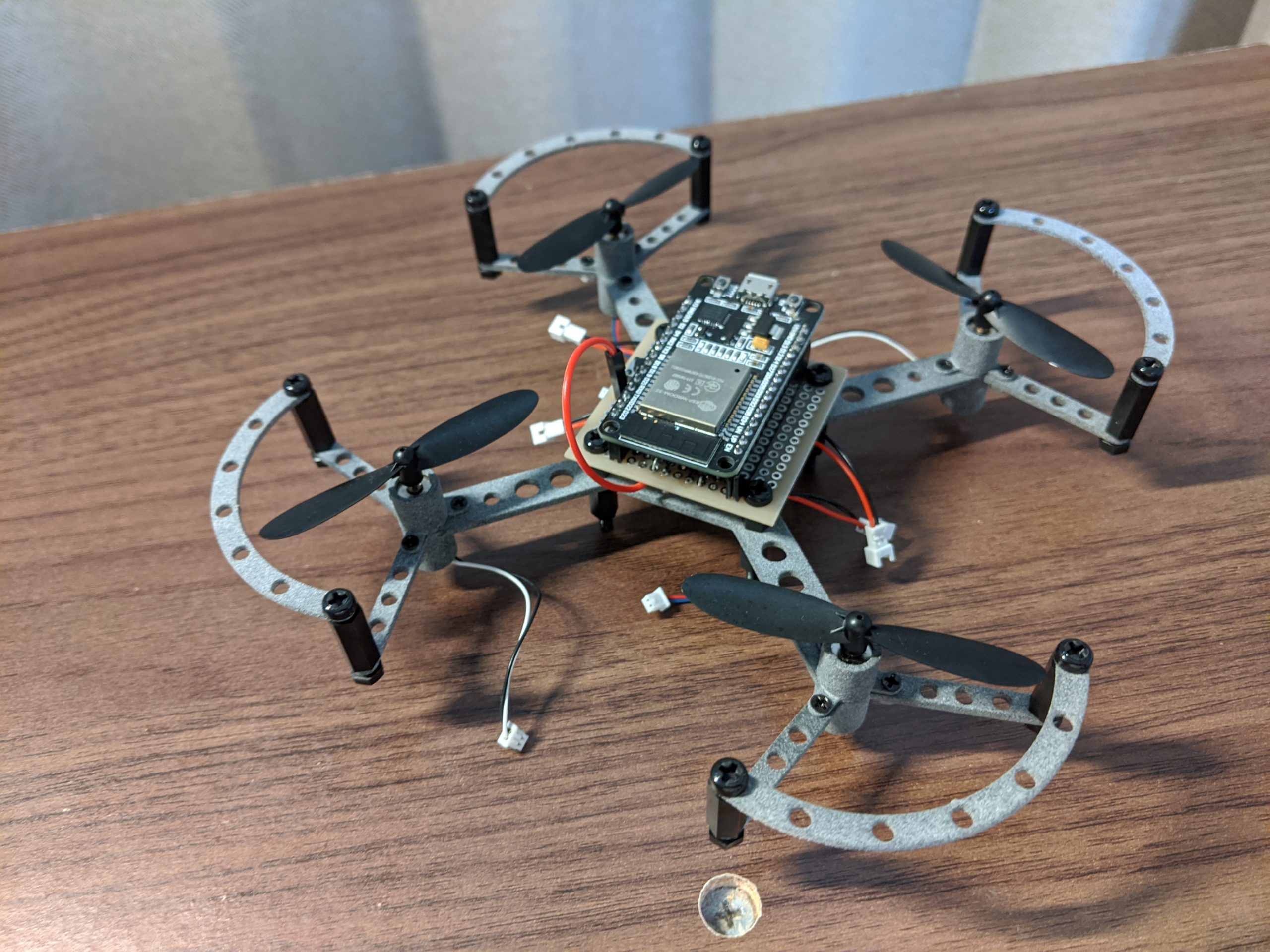
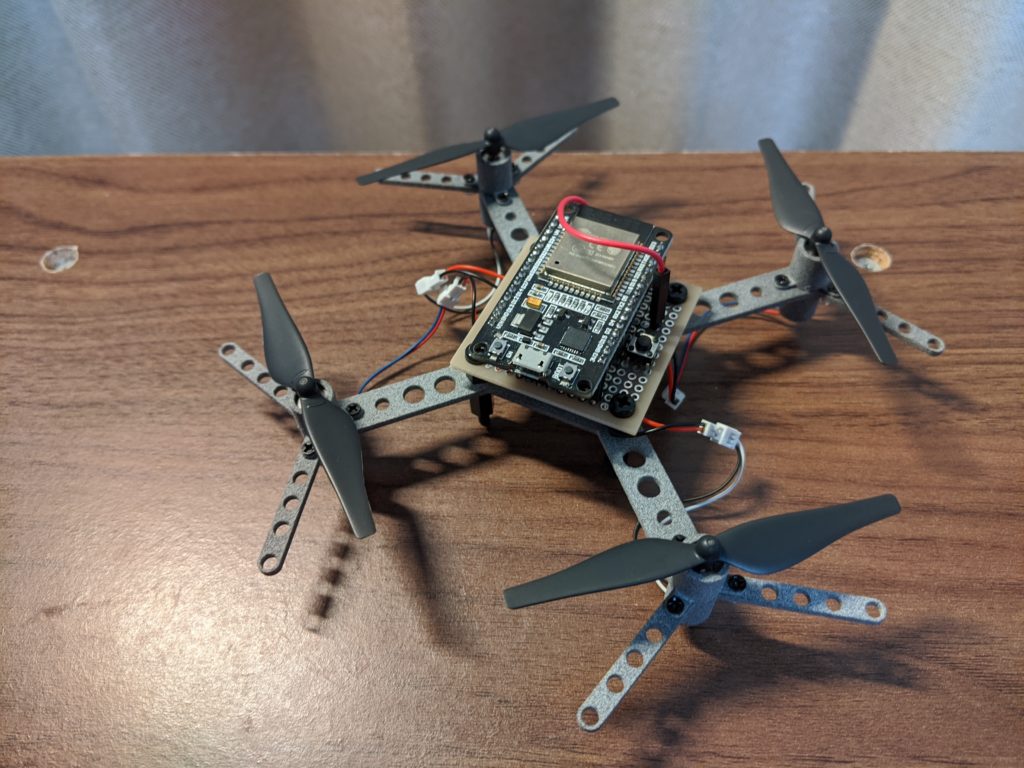
飛ばなかったドローンの動画はこれです.
飛ばない理由と改善策
あたりまえではありますが,大きく分けると飛ばない理由は3つだと思います.
- 機体が重い
- 推力が足りない
- 電気出力が足りない
機体の重さ
私が作った機体の重量は,以下のようになりました.※バッテリは含まない.
| プロペラガードこみ | 67g |
| プロペラガードを外した場合 | 61g |
重いですね.でも,重さに関しては許容範囲のように思います.
というのも,私が作ったドローンと似たようなモータやプロペラを使って飛んでいるドローンは世の中に他にもあるからです.
参考になるのは以下です.
| プロペラ | 重量 ※バッテリ含む | バッテリ | |
| DJI Tello | 直径 77mm | 80g | Lipo 3.8V 1.1Ah |
| HS220 | 直径 60mm | 80g | Lipo 3.7V 750mAh |
| STEVAL-DRONE01 | 直径 65mm | 70g | Lipo 3.7V 600mAh 30C |
| X1 FPV | ? | 70g | 600 mAh |
| HUBSAN X4 | ? | 51g | Lipo 3.7V 380mAh |
| 自分のドローン | 直径 60mm | 61g(バッテリ除く) | ニッケル水素 4.8V |
あくまでも感覚ですが,60gを超えると380mAhのリポバッテリでは物足りなくなりそうです.
そもそもモータが重いのでは?とも思いました.現状,モータは1つにつき5gで全体だと20gの重量になっています.1.8gくらいの重量のモータもあるので,これで試してみるというのも一つだと思っています.
現在の構成から,機体を軽くするには以下の方法があるかと思います.
- 電気回路を可能な限り,表面実装にする.(3gくらい軽くなると予想)
- esp32のブレイクアウトボードを自作する.(5〜10gくらい軽くなりそうだが難易度高)
- モータを軽いものに変える.(15g程度軽くなる.フレームも変える必要あり.推力が足りない可能性あり.)
- フレームと基板を一体化させる.(5〜10g軽くなりそう.)
- 電気回路をプリント基板にすることで,配線の分を軽くし,薄くすることで軽くする.(2g程度軽くなりそう.)
推力を上げるには
推力を上げるためには,次節で紹介する電気出力を上げる方法の他に,以下の方法が考えられます.
- モータを出力の高いもの(ブラシレスモータ)に変える
- プロペラのサイズを大きくする
ブラシレスモータにする場合,三相交流の仕組みやESCの使い方についても学ばなければならず,今の私には敷居が高いかなと思っています.
プロペラと推力の関係性についてですが,厳密に推力を計算するのは難しいので…(ちゃんと計算しようとしているサイトはここにあります.)プロペラのサイズを大きくした場合に,どれくらい推力上がるの?というのを以下のサイトを元に計算してみたいと思います.
私はいま手持ちに,直径が60mmのプロペラと77mmのプロペラがあります.上記サイトの計算式から,以下が成り立つので,
プロペラAの出力推力/プロペラBの出力推力 = (プロペラAの直径/プロペラBの直径)^3
77mmのプロペラの推力/60mmのプロペラの推力 = (77/60)^3 ≒ 2.1
約2.1倍に推力を上げることができそうです.厳密にはプロペラのピッチや回転数も考慮しないといけないので,あくまでも概算です…
電気出力について
バッテリの問題
モータを回すための電圧Vddが足りていない・バッテリの電気容量が足りていないというのも原因として考えられます.
ちょっと脱線しますが,Vddは「Nch MOSFETのドレイン側の電源」とVccは「電源ICを動作させる電源」という暗黙の使い分けがあるみたいです.知らずにVddとかVccとか使っていました.
電池を6個または8個直列につないでみて,ドローンが飛ぶかどうかを確かめたいと思います.リポバッテリだと飛ぶかどうかも確かめたいと思います.(リポバッテリだと,電圧自体は低くても瞬間最大出力が高いため飛ぶかもしれない.)
回路構成の改変
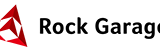
ドローン飛ばない問題をD先輩に相談してみたところ,現在の回路構成だと,モータが回転したときにVdsが小さくなってしまうため,Idが小さくなり,モータ出力が頭打ちになってしまうのではないかという指摘を受けました.
そこで,これを解消する回路構成を提案していただきました.現状の回路構成が左の図で,D先輩の案が右の図です.
ざっくり説明すると,左の図の回路だとモータが回転したときにドレイン・ソース間電圧Vdsの値が小さくなり,電流のMAX値が制限されてしまいますが,右の回路だとMOSFET OFF時(Vgsが0Vのとき)は電流が電源から直接流れるため,電流のMAX値は電源をモータに直接つないだときと同じになります.これによってモータ出力UPが図れます.
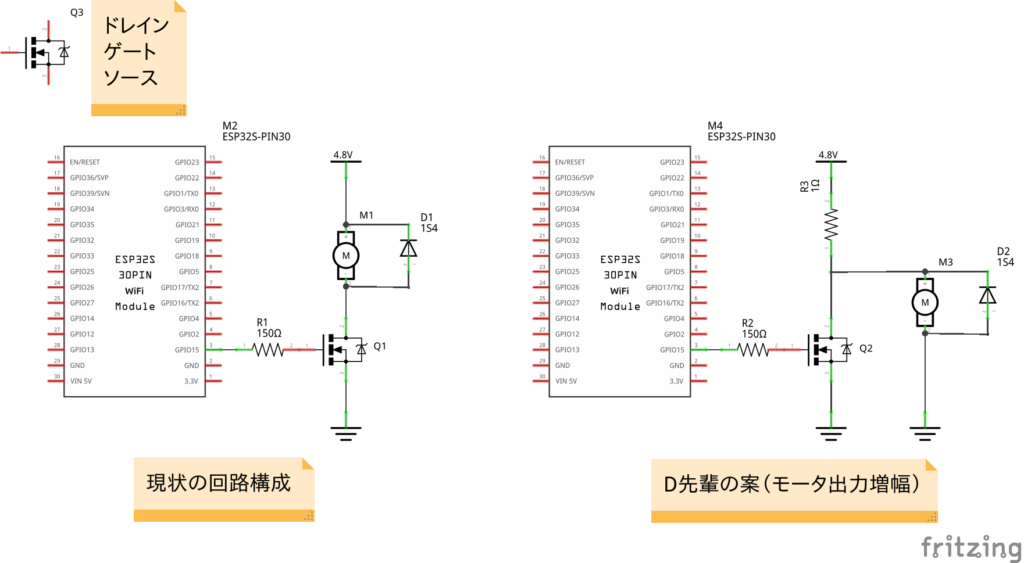
もう少し詳しく見ましょう.
MOSFET OFF時の電流の流れはこんな感じで,
MOSFET ON時の電流の流れはこんな感じです.
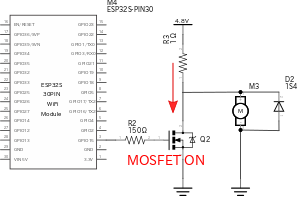
MOSFETは電気的なスイッチのようなもの(説明ざっくり)なのでゲート電圧が加わると,高負荷なモータよりも優先してトランジスタ側に電流が流れるという仕組みです.
PWM信号は,ONとOFFを繰り返す信号なので,PWM信号を入力したときはMOSFET ONとOFFを繰り返し,モータ出力を制御できます.
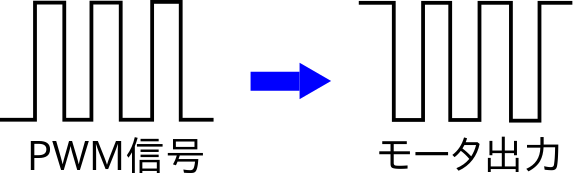
ここで,MOSFET OFF時にモータ出力がMAX,MOSFET ON時にモータ出力がOFFとなる特性上,PWM信号が反転するという点に要注意です.
この構成には,以下のようなデメリットがあります.
- PWM信号とモータ出力が反転する.(ソフトウェアでカバーします.出力を反転するだけなので簡単です.)
- R3抵抗値をはさまないと,ショートしてトランジスタが燃える.R3抵抗値は大きいとモータが回らない.
- R3の値が大きいと,モータが回らない.はじめR3を150Ωくらいにしていたら全くモータが回りませんでした.1A流れるごとに150Vの電圧降下が起こってしまうことになるので当然な結果ですね^^; R3は1Ω程度の抵抗にしようかと考えています.
- モータを回さないときも大電流が流れる.(上記だと,4.8V/1Ω = 4.8A)
この方法は教えていただいたときに,MOSFETってこんな使い方あるのかと感動しましたが,先人たちが作っている自作ドローンの回路構成を見てみても,このような回路構成にしているものは見当たりませんでした.おそらく,モータを回していないときに大電流を垂れ流してしまうという大きなデメリットがあるためではないかと推測します.
でも,アイデアとしてはとてもおもしろいのでD先輩に許可を得て記事にさせていただきました.ありがとうございました!
MOSFETトランジスタの特性の問題
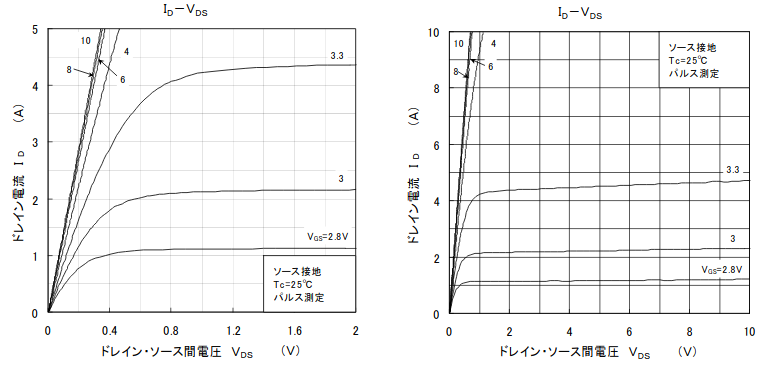
今回私が使用した2SK4017とELECTRONOOBSさんが使っているSI2302を比較すると,Vds – Id特性にかなり違いがあるように見えます.
2SK4017のVds – Id特性
http://akizukidenshi.com/catalog/g/gI-07597/
SI2302のVds – Id特性
https://www.mouser.jp/Search/Refine?Keyword=SI2302
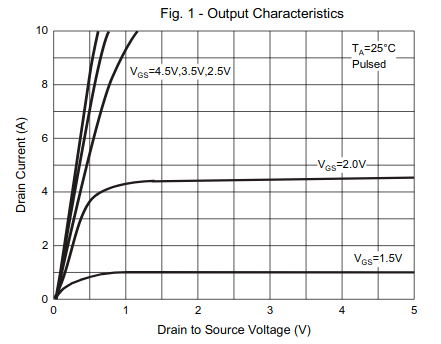
2SK4017とSI2302のId(太字部)を比べてみると,明らかにSI2302の方が大きな電流を出力できていることがわかると思います.
| 2SK4017 | SI2302 | IRFML8244 | SI2312 | STL6N3LLH6 | |
| Vgs = 3.3, Vds > 1 | 4.5A | 10A以上 | 5A | 15A以上 | 7A以上 |
※上記は,データシートを見る限りのおおよその値です.
世の中の飛んでるドローンのMOSFETを調べてみると,以下のようなものがあったので上記の表に加えています.
あと,モータを使用するとVdsが下がるので,Vdsが下がってもある程度大きなIdを出せるMOSFETを使うべきなのかと感じました.(これに関しては,調査不足です.)
上記からすると,この記事で私が選定した2SK4017がドローンを飛ばすには不向きなMOSFETだったのかもしれません.
改善策
まとめると,改善策は以下です.次の開発で試してみようと思っている案に◯をつけてます.優先度の低いものは△としてます.×のものは今の私には難度が高いので,次の次の開発くらいで試せたらいいなと思っています.
- (◯)電気回路をPCBにすることで,配線の分を軽くし,基板を薄くすることで軽くする.
- (◯)基板とフレームを一体化させる.
- (◯)Vddを上げる.
- (◯)MOSFETトランジスタを変えてみる.
- (△)回路の構成を変えてみる.
- (△)プロペラのサイズを大きくする.
- (△)リポバッテリを試す.
- (×)電気回路を可能な限り,表面実装にする.
- (×)esp32のブレイクアウトボードを自作する.
- (×)モータを軽いものに変える.
- (×)出力の高いブラシレスモータを使う.
飛ぶドローンをつくるための実験と考察
Vddを上げると機体は浮くのだろうか?
モータ駆動電圧のVddを12V(乾電池8個)にしてみましたが,結局機体は浮きませんでした.
現状推力はどれくらい出ているんだろう
はかりの上にティッシュ箱,その上に今回自作したドローンを置いて出力をMAXにしたときに,どれくらい機体の重量が軽くなるかを測ることで推力を推定してみました.

※はかりの上に直接ドローンを乗せて実験すると,ドローンの動作が不正規になりました.おそらく,はかりの磁気と反応してモータが誤作動する(?)のかなと思ってティッシュを挟み,問題は解決しました.(詳しくないので完全に憶測です.)
結果は-12gとなり,推力は概算で12gfしか出ていないという悲しい結果になりました.機体が61gなので当然浮かないですね.機体を軽くする必要もありそうですが,回路構成を変更する必要性もありそうです.
ちょっと測定の仕方が微妙(本来ならモータをちゃんと固定して,モータースラストテスタで測るべき?)なので,推力の推定値はかなり不確かではあると思っていますが,とりあえず手近なもので測ってみました.
プロペラのサイズを大きくするとどうなる?
意外と簡単にプロペラのサイズを大きくできたので,プロペラサイズを大きくした場合にドローンが飛ぶかどうかも調べてみました.プロペラと機体中心部との間に余裕を持った機体設計をしていてよかったです.DJI Telloさんの直径77mmのプロペラにしています.
ちょっとかっこよくなりました!(^o^)
悲しいことにプロペラを大きくしてもドローンは飛びませんでした.
前節と同様に,推定最大推力を測定してみたところ14gfとなり,推力はほんのわずかに上がっていることはわかりました.推力とプロペラサイズの関係から考えると,理論的には推力は2倍くらいになるはずなんですけどね…
そもそもエボルタでドローンは飛ぶのか?
ここが結構なぞな部分でした.もちろん私もドローンをリポバッテリで飛ばしたいとは思っているのですが,リポバッテリは燃えやすいなど,ネットにはいろいろ怖いことが書いてあるので,もう少し電気回路に詳しくなってから使いたいなと思っているのです.
なので,エボルタでドローンを飛ばそうとしているのですが,そもそもエボルタだと電池の容量が小さくてドローンを飛ばせないのではないか?という疑問がありました.
そこで,前にAmazonで買った2,000円位のドローンにエボルタをつないでみて,ドローンが飛ぶのかを確かめてみました.結論から言うと,ドローン飛びました!
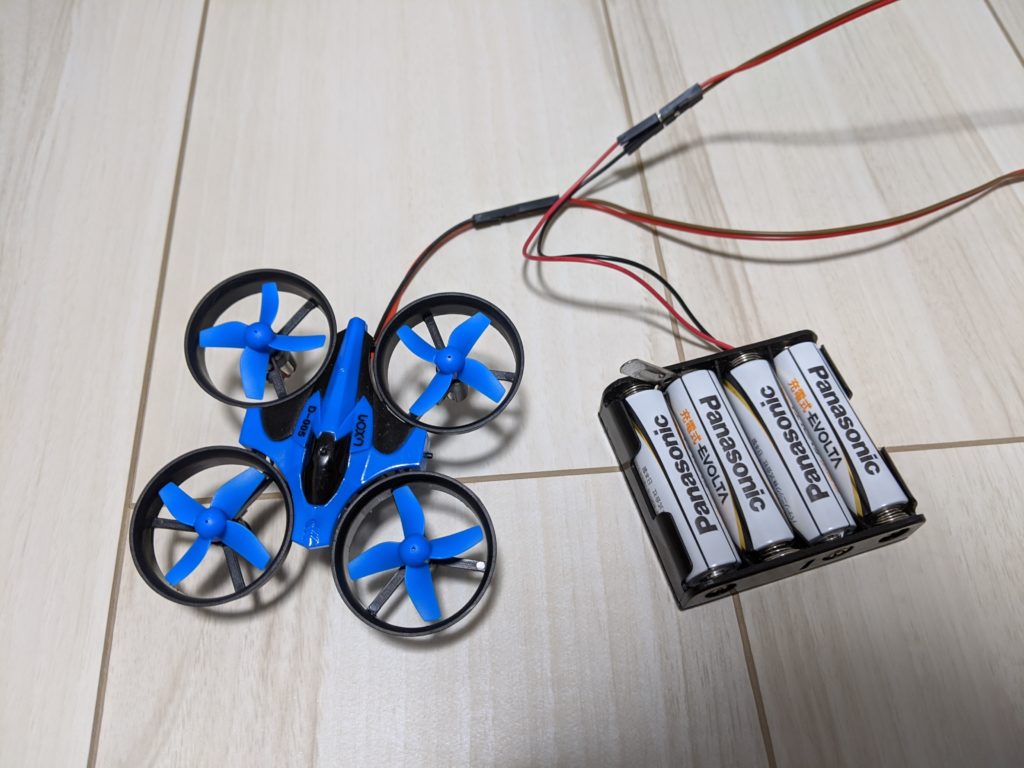
リポバッテリと比べるとすこし推力不足は否めないですが,一応ドローンは飛んだので,エボルタを使うという方針で問題ないと思っています.
調べようと思ったけど,今回調べなかったやつ(備忘録)
以下は,また今度調べようと思った部分です.時間があるときに追記しようと思います.
- モータ回転中のVdsを測ってみて,データシートと比べてみる
- MAX出力のときのモータ電圧はどれくらいか
- モータのつなぎ方を変える(D先輩案)
- モータ回転時もレギュレータで電圧安定化できるか実験(dropout電圧との関係考察)
世の中の飛んでるドローン
世の中には先人たちがちゃんと飛んでいるドローンを作っています.
先人たちのドローンのブログ記事は電気回路作成やフレーム作成においてとても参考になるので,ここにまとめておこうかと思います.
以下のサイトは,回路の設計・フレーム・※プログラムの作成も自ら行っている記事なので,自作する際に非常に参考になる記事だと思います.
※ELECTRONOOBSさんとDEVICE PLUSさんは,ソフトウェアにmultiwiiと呼ばれる,Arduino用のOSSのフライトコントローラを使用しています.
MultiWii is an open source software project aiming to provide the brain of a RC controlled multi rotor flying platform. It is compatible with several hardware boards and sensors.
https://code.google.com/archive/p/multiwii/
どうしてもブラシモータだと出力不足という場合には,ブラシレスモータを使うことを考えますが,現段階ではブラシモータを使って再度ドローンを組み上げたいと思っています.
ブラシモータを使用しているドローン
DEVICE PLUS さん

こんなにシンプルな構成で飛ばせるのか?と思うくらいシンプルにドローンを組み上げています.
自作ドローンを組み上げるのに絶対に必要となるパーツ類も紹介しているので,これから自作ドローンをはじめてみたい!って人にはすごく良いサイトだと思います.
モータ駆動用にバイポーラトランジスタを使っていますが,バイポーラトランジスタでドローン飛ばせるんですかね…ちょっとそこが疑問に思いました.私の中では,バイポーラトランジスタだと出力不足になってしまうイメージです.機体がめっちゃ軽いのかなぁ.
記事で紹介しているモータブラケットがいいなと思ったので,似たようなモータブラケットを3Dプリンタで作れないか考え中です.
ELECTRONOOBS さん

英語で自作ドローンの解説をしてくれています.キットを販売しているようで,部品構成や回路図も詳細に書かれているので参考になります.表面実装におけるはんだ付けの方法やbootloaderの書き込み方についても少し触れています.
モータとマイコンを同一電源で駆動させる際は,電源周りに昇圧モジュール or レギュレータを挟む必要があると思ったのですが,このサイトの回路だとそれはしていませんね.コンデンサだけで十分電源安定化できるということなのでしょうか?詳しい人いたら教えてくださいm(-_-)m
ELECTRONOOBSさんのトライアルをちょっとまとめてみると,こんな感じです.
- 1.6mmの厚さのPCBでフライトコントローラを作ったら,48gであったが飛ばなかった.
- PCBを0.6mmにしたら,今度はボードがふにゃふにゃになってしまって安定して飛行できなかった.(私の機体もふにゃふにゃだったことがあったなぁ.)
- プロペラを直接モータで回すのではなく,モータとプロペラの間にギアを挟んだらドローンが飛んだ.
特に,最後の改変によって以下のメリットがあったと言っています.
- モータに大電流を流さなくとも同一の推力を出力することが可能になったため,電流のスパイクが生じづらくなり,ボードが勝手にリセットしなくなった.
- ドローンの機体を大きくすることができ,飛行が安定した.
- プロペラを大きくすることができ,推力が向上した.
ELECTRONOOBSさんのドローンのマシンスペックは,以下の通りです.
- フレームサイズ:140mm x 140mm,対角線は190mm
- 重量:61g
以下,回路周りで参考になるなと思ったtipsです.
- 無線モジュールとマイコンの距離は短めにすることでノイズを軽減できる.
- HT73 LDOという※dropdown電圧が小さい(60mV)レギュレータを使うことで,4.2V -> 3.3Vの電圧安定化を実現している.
※dropout電圧とは?:トランジスタが安定に動作するために必要な入出力間の最低電位差のことです.たとえば,3.3Vがアウトプットのレギュレータがdropout電圧が1.0Vだとしたら,インプット電圧は4.3V以上でなければなりません.dropdown電圧が60mVのレギュレータということは,3.36V以上の電圧であればいいみたいですね.
魔法の大鍋 さん

基板と土台を同一にするという方法でかなり軽量化をはかっています.この方法は非常に参考になるなと思いました.
マシンスペックは以下のようです.自分の気になる部分だけ抜粋しました.機体重量がめっちゃ軽いです.
- モータースパン = 65mm(左右)/ 92mm(対角),最小構成では60mm / 85mm
- ローター直径 = 55mm
- 最大合計推力 = 76〜80g
- 機体重量 = 約34.3g〜(バッテリ含む)
- バッテリー(240mAh or 320mAh) ※バッテリーは1Cell使用
ちなみに,4枚羽のクアッドロータだけでなく,ヘキサロータやオクトロータも手がけているようです.
もっと詳しい情報は,魔法の大鍋さんのサイトに記載されているのでこちらをご覧いただければと思います.ドローンの販売もしているみたいです.
もう疲れたので電子工作します さん

回路図を書いてくれているため非常に参考になります.表面実装で軽いドローンを作っています.この記事によると,48gでドローンは浮上したみたいです.感覚的にこれくらいモータの音がうるさくないと飛行する推力は出ないのかも…と思いました.私のいまのドローンはモータの音が静かすぎるように思いました(-.-;;)
トランジスタの許容損失の問題で,モータが止まることがあったという記載があります.許容損失Pdは重要そうですね.
レギュレータを使って,マイコン用の電源を安定化させていますね.INPUT側のコンデンサを0.1uF,OUTPUT側のコンデンサを47uFにしているのが回路図から読み取れます.回路図からレギュレータを何にしているのかまでは読み取れませんでしたが,おそらく,その後の記事から読み取るにTA48M033Fというレギュレータを使っていそうです.このレギュレータは最大dropout電圧が0.65V,最大出力電流が0.5Aです.
あと,やっぱり表面実装の部品を使って機体重量を軽くするのが重要そうですね.むかしドローンを作られている方から,1gでも軽いドローンを目指すべきだというお話を聞いて,そのときはあんまりピンときませんでしたが,ドローンの世界では1gもバカにならないということを今回の開発を通して痛感しました.
STMicroelectronics さん

このサイトでは,ドローンを販売しています.販売しているドローンの回路図を親切に載せてくれています.BLE通信を備えていて,スマートフォンから操作できるみたいでスゴイです.
マシンスペックは以下のようになっています.
・Four motors: 85×20 mm, 3.7 V
https://www.st.com/ja/evaluation-tools/steval-drone01.html
・Two clockwise and two counterclockwise 65 mm propellers, plus a couple of spares
・LiPo 3.7 V / 600 mAh battery with a maximum discharge current of 30 C
電子部品には,以下を使っているようです.すべて自社製品のようです.
| 種別 | 型番 | 備考 |
| レギュレータ | LD39015M33R | 3.3V出力,低いdropout電圧(80mV) |
| MOSFET | STL6N3LLH6 | ロスの少ないMOSFET |
| 圧力センサ | LPS22HBTR | |
| 磁気センサ | LIS2MDL | |
| 6軸センサ | LSM6DSL |
ゲート・ソース間抵抗を導入していました.この記事で詳しく紹介されていましたが,以下の理由でゲート・ソース間抵抗を導入するみたいです.
・入力信号がない時(オープンになった時)に確実にゲートの電位を0Vにするため
https://detail-infomation.com/mosfet-gate-to-source-resistor/
・ドレインに高dv/dtの電圧が印可された時にMOSFETがターンオンするのを防ぐため
・制御ICのシンク電流が十分でないときに補助するため
レギュレータに関してですが,入力側に4.7uFと100nFのコンデンサをつなぎ,出力側に1uFのコンデンサをつないでいます.一般的には出力側のコンデンサを大きく設計するイメージなので,私にはあまり設計思想がわかりませんでした.
https://www.st.com/ja/evaluation-tools/steval-drone01.html
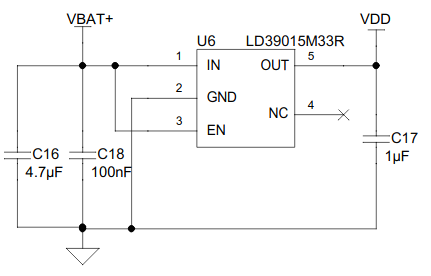
ちなみに,この記事によると静電容量C1とC2のコンデンサを並列につなぐと静電容量はC1+C2となるようです.高校生のときに習った気がする.
入力コンデンサと出力コンデンサの設計方法についても調べてみたいですが,脱線しすぎてしまうので見つけたサイトの紹介のみにとどめておきます.むずかしそう…
Tokoro’s Tech-Note さん

基板自体をフレームにすることで小型化・軽量化に成功していてスゴイです.あと,デザインがすごいスタイリッシュです.
スペックは以下のようです.気になった点のみ抜粋しています.
- サイズ:90 x 90 x 25 [mm x mm x mm]
- 28g(バッテリー含む)
- 7mmコアレスDCモータ
- MOSFET:IRFML8244
28gは相当軽いですね.
回路図を見ると,モータと並列にコンデンサを導入しています.おそらく,DCモータのノイズ対策のコンデンサですね.もう疲れたので電子工作しますさんもモータと並列に0.1uFのコンデンサを導入していました.
DCモータの欠点として大きいのは、その構造上ブラシとコミュテータによる機械式接点があることです。これによる影響は、転流時のスパーク、回転騒音、寿命という形で現われます。また、マイコン制御をしようとした時は、「ノイズ」という形で現われて来ます。(中略)このノイズ対策のためには(中略)0.01μF~0.1μF程度のセラミックコンデンサを直付けします。これで整流子で発生するスパークを吸収し、ノイズを抑制することができます。
http://www.picfun.com/motor01.html
ブラシレスモータを使用しているドローン
AKIRACING.COM さん

ドローン製作を開始した一番初期にお世話になったサイトで,マイコンはArduino,無線通信にはXbeeを使っています.姿勢制御用のPIDプログラムの組み方も参考になるかと思います.
ちなみに私は,Xbeeを購入してすぐに壊してしまった(おそらく3.3V電圧入力なのに5Vを入力してしまった)ので,Xbeeを使うのはやめました(T_T)
サイズは結構大きめのもののようで,プロペラの対角線の長さが350mmだそうです.
MPU9250という9軸センサを使っているようです.秋月だと見つからなかったので,私はBMX055というセンサを使うこととしました.
この記事では,糸でドローンを吊るしてPID制御のテストをしています.
とある科学の備忘録 さん
上に同じくArduinoとXbeeを使っています.気になる特徴を以下にまとめました.
- ブラシレスモータを使っている.1つのモータで500gf以上の推力が出るらしい.
- ポリスイッチという過電流保護に用いられる素子を使っている.(電流が流れすぎたときに,その部分の電気の流れを遮断する.)記事
- バッテリ電圧監視機能を搭載している.記事
- データの送受信アルゴリズムを工夫している.記事
この記事でも前節の記事と同様,糸にドローンを吊るしてPID制御のテストをしています.
ハサミの技術備忘録 さん
ごく最近書かれた記事です.ドローン製作に取りかかる前に目標設定を行っていて,計画の立て方や目標設定の方法も参考になります.
KiCad単体では自動配線ができないようで,freeRoutingというツールを使って自動配線をしたそうです.基板とモータをダンパで分離して,振動対策をしているみたいです.振動対策の必要性については一切考えていませんでした(^^;
スペック表で気になる部分を抜粋させていただきました.100g超えてもブラシレスモータなら飛ぶんですねぇ.どうしても飛ばなかったらブラシレスモータを検討しようかな.
| サイズ | 160×160×55mm |
| 重量 | 121g |
| マイコン | Teensy4.0 |
| 姿勢センサ | BMI088 |
| プロペラ | LDARC/Kingkong 1935-3S |
| モータ | RCX RS1103 7800KV Micro FPV Racing Motor |
| バッテリー | LDARC/KingKong FPV EGG Li-Polymer Battery 7.4V (2 Cells) 550mAh 80C |
| 受信機 | R3206SBM |
| レギュレータ | NJM2391 dropout電圧:1.1V |
番外編:レゴモータを使っているドローン
世の中には,いろんなドローン作っている人がいます.レゴモータを使ったドローンを製作して飛ばしている人がいるので紹介します.組み立て動画もおもしろいです.
ギア比やモータを変えながら,安定化電源で推力テストを行っています.最大電流は800mA程度で,リポは9つ使って33.3Vの電源としています.
最大推力と重量の差を60gfくらいにして飛ばしているみたいです.機体重量がかなり違うので参考になるかわかりませんが,ここで使われているIRLR2905というMOSFETも大きなIdを流せる素子のようでした.
| Motor driver circuit | MOSFET IRLR2905 + Schottky diode 1N5819 + Resistor 12 kOhm |
| Battery | LiPo 9s 33.3V 200 mAh (made out of nine Turnigy nano-tech 200mAh 3.7V 35-70C Pico) |
| Weight with battery | 410 grams |
| Max thrust | 470 grams |
まとめ
ざっくりと言うと,ドローンが飛ばない理由は,「機体が重い・推力が足りない・電気出力が足りない」の3つだと思います.これを解消する手段については1節でいろいろ挙げてみました.
これから飛ぶドローンを作りたい方は私の失敗を少しでも参考にしてもらえればうれしいです.もし,何か良い改善策があれば教えていただけるとすごくありがたいですmm(-.-)mm


コメント