 ROS
ROS 自分で作成したマップを使って TurtleBot シミュレーションをする #ROS 2 #nav2
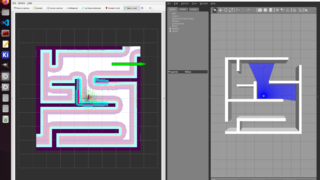
前回の記事で、nav2_bringup を模倣した custom_nav2_bringup という ROS 2 のパッケージを作成し、nav2 の設定をカスタマイズする準備を整えました。今回はマップファイルを自ら作成し、そのマップ上で T...
ROS  ROS
ROS  ROS
ROS  ROS
ROS  Software
Software  Electronics
Electronics  Control
Control  Software
Software  Software
Software