 ROS
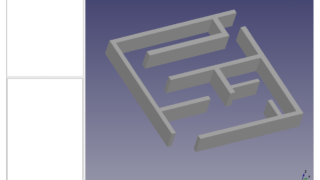
ROS Nav2 講座 5: .pgm ファイルを .stl ファイルに変換し、Gazebo simulation に使用する
前回の記事で、自分で作成した map 上でロボットを動かすシミュレーションに成功しました。
ただ、この方法の問題点として、作成した map によっては .world ファイルの容量が重くなってしまい(試しに作成した .w...
ROS 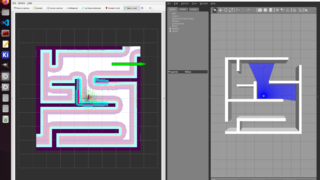 ROS
ROS  ROS
ROS  ROS
ROS  ROS
ROS  Robot
Robot