 Electronics
Electronics ドローン制作 2-6: PCBWay に基板を発注する
本記事では、ドローンの基板を PCBWay に発注する方法を説明します。過去記事は以下です。
ドローン制作 2-1: 準備・部品選定ドローン制作 2-2: ブレッドボード試験ドローン制作 2-3: ドローン schemati...
Electronics 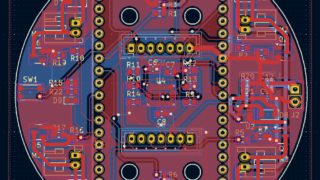 Electronics
Electronics  Electronics
Electronics 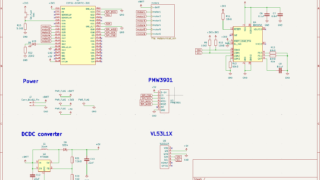 Electronics
Electronics 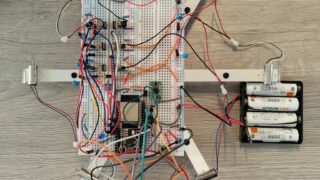 Electronics
Electronics  ROS
ROS  ROS
ROS  Uncategorized
Uncategorized  ROS
ROS  ROS
ROS